Demonstration scenes using AGX Dynamics SDK
The simulations start in paused mode. Continue simulation with the 'e' button
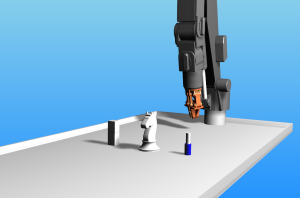
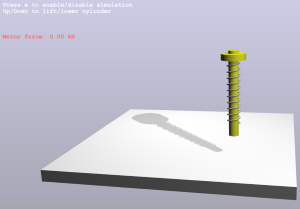
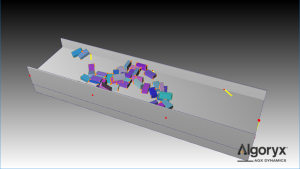
Picking small screws from a box
This scene demonstrates a picking device capable of picking screws that are 9mm long. By using AMOR (Automatic Model Reduction) the performance of a complex scene can be retained.
Keyboard bindings:
- Left/Right - Move sideways (X)
- Up/Down - Move Back/Front (Y)
- 'z', 'x' - Open/Close
- PageUp/PageDown - Up/down
- Home/End - Rotate left/right
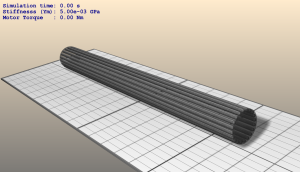
Deformable rollers
This script demonstrates how to model deformable rollers.

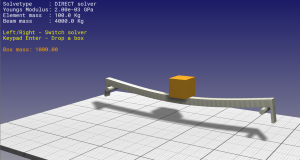
Flexible Beam
This script demonstrates a flexible beam modelled using lumped elements.
With the Direct solver, the beam can be arbitrarily stiff. When using the Iterative solver the beam will become soft/rubber-like due to the limited precision of the iterative solver.Keybindings:
- Up/Down - Increase/Decrease stiffness of the beam
- Keypad Enter - Drop a box onto the beam
- Left/Right - Use Direct/Iterative solver
Suction gripper model
This demonstrates the agxModel::SuctionGripper model that can be used by a robot to pick up objects.
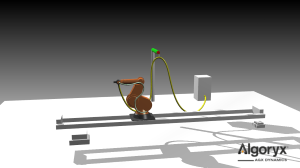
Grasping robot demonstration
This scene requires a Gamepad (XBox360 is recommended)
Gamepad bindings:
- Right Stick Y - Moves the robot arm up/down
- Left Stick X - Move the robot arm left/right
- Left Stick Y - Move The robot arm in/out (from the base)
- D-Pad (X/Y) - Controls the lower hinges which move the lower part of the robotic arm.
- Button A/B - Open/Close Yaw
- Right/Left Bumper - Rotate wrist left/right
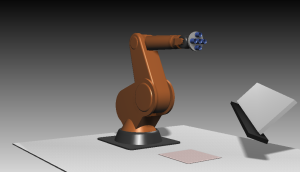
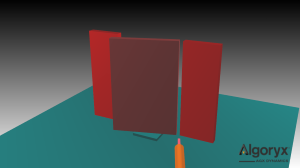
Robot manipulating sheet metal
This scene consists of a robot manipulating a sheet metal (flexible) object.
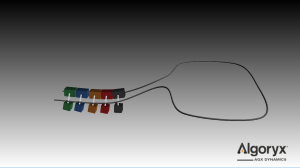
Twisting cables
This demonstrates how the Cable model can be used to simulate a set of cables being twisted.
Keyboard bindings:
- Up/Down - Increase/Decrease stiffness in the cables
- Page up/down - Start motor clockwise/counter clockwise.
- Home - Stop motor.
Robot with cables
This scene demonstrates a robot moving with attached cables.
Mesh to Cable
This demonstrates how to use the agxUtil.SphereSkeletoniser to generate a cable from a triangle mesh.
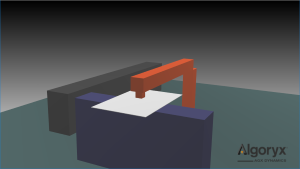
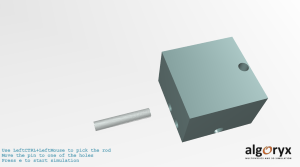
"peg-in-a-hole" demonstration
This show how an implementation of a stable peg in a hole scenario can be implemented. By using a constraint and collision sensors, a plausable simulation of this can be achieved.
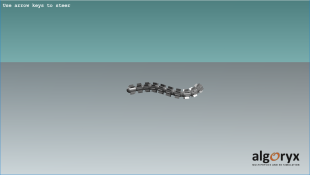
Snakebot
Demonstrates a "snakebot", a robot in water which use twiggling
motions as propulsion. It can be controlled with arrow keys on the
keyboard.
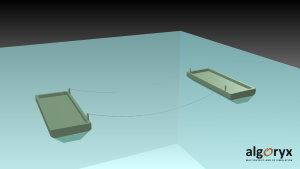
Ships
Two ships floating in water connected with wires
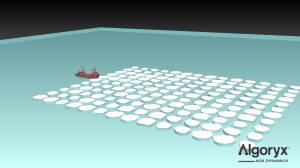
Ice floes
This scene demonstrates the hydrodynamic modelling of a large number of ice floes.
Cables
Demonstrates how agxCable::Cable can be used to model flexible structures
such as cables and hoses.
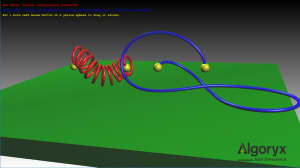
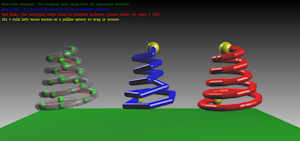
Modelling Torsional spring with agxCable
This script creates a torsional spring using the agxCable API. By routing a agxCable::Cable in a spiral, then calling Cable::rebind() will reconfigure the cable so that the current state is the rest state.
Pressing up/down key will lift/push down the weight. Releasing the button will release the weight
Overhead hanging conveyor
Showcases the SplineJoint for modelling an overhead hanging conveyor.
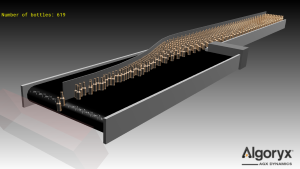
Bottles transported on a Conveyor
This scene contains a conveyorbelt model that transports a large number of bottles
Curved surface velocity using SurfaceVelocityConveyorBelt
This script illustrates how you can define a curved velocity surface on a geometry with the SurfaceVelocityConveyorBelt class
Breaking a constraint
This exemplifies how to read constraint forces and disable them when the force/torque reaches a certain threshold.
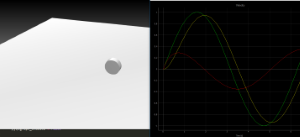
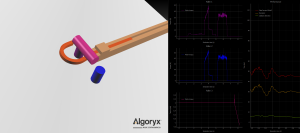
Coupled simulation with a PID controller
This demo show how a PID controller can be used to control the speed of a hinge to achieve a sine motion.
With the pyqtgraph python module, additional plotting can be used. For more information of how to use additional python modules, see AGX Python
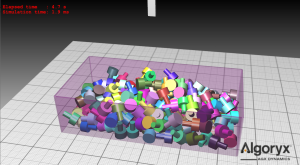
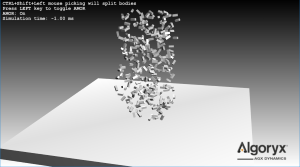
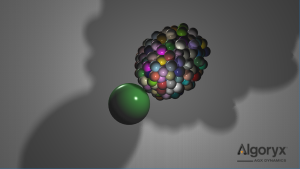
Performance acceleration using AMOR
Adaptive MOdel REduction is a method for increasing performance by merging bodies while retaining mass properties.
This is a lot more general than ordinary sleep methods as it allows merging to dynamic objects. The relative velocity/acceleration is used for determining merge.
You can toggle AMOR using LEFT key
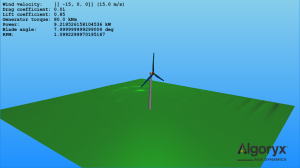
Simulation of a windmill
In this demo the aerodynamic effect on the blade of the windmill is simulated
- Key up/down: Set wind speed.
- Key left/right: Set viscous drag coefficient.
- Key a/z: Set generator torque feedback.
- Key s/x: Set blade angle of attack.
Modelling a fire hose using a Wire
This script show how to use the agxWire::Wire class for simulating a fire hose
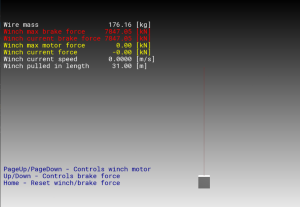
Demonstrating the use of the wire winch
The class agxWire::Winch is used for simulating a winch motor and brake. This script demonstrates how to control both the winch motor and the brake using force ranges.
Using contact event listeners to count impacts
This script show how to use contact event listeners to detect impact between objects
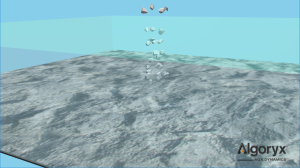
Pile of rocks under water
In this script a number of rocks (mesh objects) are created and falling down through the water surface and lands onto the sea bed.
AMOR is used for improving performance
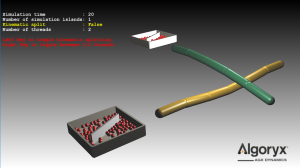
Kinematic coupling
This script demonstrates one way of achieving "kinematic split", splitting the simulation into two separate islands to improve performance.
The contact between the green/yellow object will be replaced by a contact between a dynamic object and a kinematic object, allowing the partitioner to split the system into two sub-islands.
When using two threads we get 100% speedup in this example.
Toggle kinematic coupling with the LEFT key.
Toggle between 1 and two threads with the RIGHT key.
Custom gravity field
This script show how to use the class agx::CustomGravityField to implement any general gravity field.
This script cannot be run with more than 1 thread hower as Python cannot handle reentrant calls from different threads.
In C++ however this is not an issue.
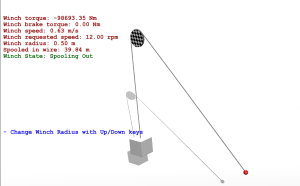
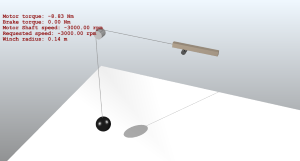
Torque driven Winch
This script demonstrates how to build a torque driven winch that can spool in/out wire
By using a winch that drives a rotating shaft connected to the winch via a WireWinchActuator we can model a torque driven winch powered by a hinge, or one of the motor models available in AGX.
Linear actuator
This script demonstrates how to build a torque driven linear actuator.
A motorized hinge is driving a rotating shaft, connected via a RotationalTranslationalHolonomicConnector
At the end of the drivetrain is a prismatic constraint that moves a rod.
Simulating a Pulley
This script illustrates how to model a Pulley, where the wire is sliding over hinged cylinders.
Without the "Pulley" property on the Geometry, the wire would slip off.
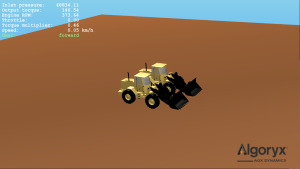
Modelling a Wheel loader
This script demonstrates how a wheel loader can be modelled.
The dynamics model is created in Algoryx Momentum and exported into a .agx file.
This .agx model file is then loaded into a simulation where a drivetrain including a combustion engine is created using the DriveTrain API.
One of the wheel loaders is controlled using the keyboard: forward/backward/left/right/a/z/s/x and the other using a Gamepad
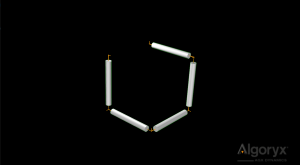
Bricard's mechanism
This script illustrates AGX Dynamics being able to handle overconstrained systems. The Bricard's example The system is composed of five rods and six hinge (rotational) constraints.
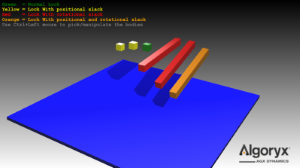
Slack constraints
Constraints with slack can be used to model constraints which has a range of free motion. Slack can be defined for rotation or translation
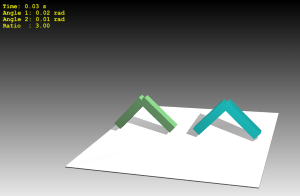
Connected Hinges
This script demonstrates how to connect several hinges together. Using the agxPowerLine API we can create a RotationalActuator and a Shaft which is connected between two hinges.
This means that if you want to rotate one of the bodies, you need to rotate all of them.
Excavator and Granular simulation
This script showcases a model of an excavator together with Granular (NDEM) simulation.
The script can be modified to reduce the size of the particles to get a more realistic result.
Be aware that reducing the radius of the granular particles will affect performance dramatically.

Synchronizing hinge rotation
In this script we demonstrate how two hinges can be connected using the agxDriveTrain API via a Gear to control the rotation between the two bodies.
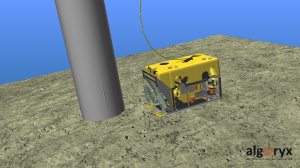
Remote operated vehicle (ROV)
This scene requires a gamepad for controlling an underwater ROV. The scene consists of umbilical cord, tether cable and a suction pile. This scene also demonstrates wire-wire and wire self-collision.
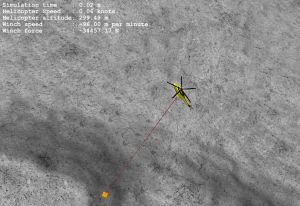
Helicopter with winch
This demonstrates a helicopter suspended in a CylindricalJoint pulling a weight using a wire/winch.
The load and the wire are affected by aerodynamic forces.
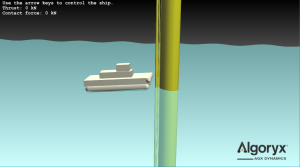
Ship floating in water
This demonstrates a ship in water with a soft fender.
The ship can be controlled with up/down arrows to change the thrust
Intersecting the physics scene with the mouse/ray
agxOSG::GuiEventListener can be used to intersect the physics scene with a ray and get back data about the shape that is intersected.
In this example you can construct a spline by creating points on the surface of various objects. By using a SplineJoint, a rigid body can be made travelling along the spline.
Keyboard bindings:
- Ctrl+Z - undo
- Right ALTGR + Left mouse - Add point on the surface of a shape
- Keypad Enter - Spawn a rigid body that moves along the spline
- o - Write current points to a json file
- i - Read points from a json file

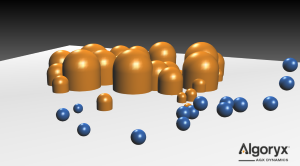
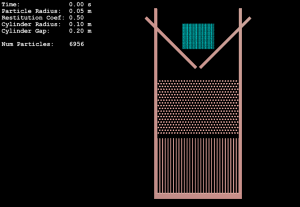
Granular simulation of a galton board
This script contains a simulation of a Glaton Board using granulars, demonstrating a binominal distribution.
Changing the properties of the board and contact material affects the probability of going left or right at each intersection and thus the properties ( variance and mean ) in the resulting distribution.
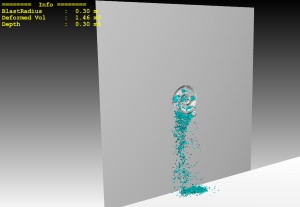
Deformable mine face simulation
Demonstrates how to use the class agxModel.DeformableMineFace for simulating a deformable heightfield. In this scenario we are cutting into the heightfield using a geometry generating "muck", that is loose materials from the "blasting" operation that is emitted as granular objects.
Bending rod
This scene demonstrates how a steel beam is bent using a medal bending jig.
The metal rod is modelled using the agxModel::Deformable1D class. This model includes elasticity as well as plasticity.
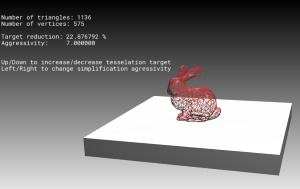
Mesh reduction
This example demonstrates the agxUtil::reduceMesh function for simplification of triangle meshes.
Keyboard bindings:
- Up/Down - Change the target for reduction (in %) of the triangle mesh.
- Left/Right - Change the aggressiveness of the mesh reduction algorithm.
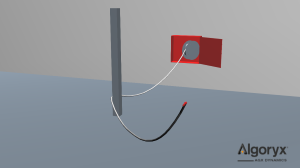
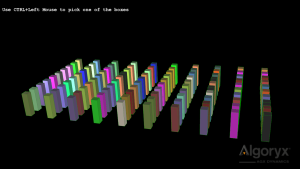
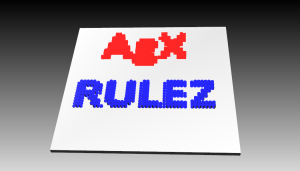
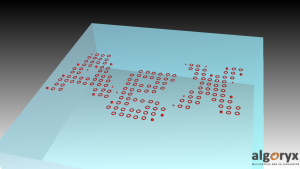
Spawn bodies from image data
This demo script shows how an image file is used to spawn boxes and cylinders depending on the pixel values. A Red pixel will spawn a box, and a blue pixel will spawn a cylinder.
Buoyancy
This scene demonstrates the buoyancy functionality in AGX. Triangle meshes and spheres floating with drag and viscous damping.
Hydrodynamics for wires
This scene illustrates hydrodynamic effects on wires.
Hydrodynamics crane
This scene show a crane floating in water. Both the crane as well
as the wire is affected by hydrodynamic forces: lift, drag and
buyoancy.
Submarine
Using buoyancy, lift & drag this "submarine" can be navigated
in the water. The submarine is being pulled by a wire attached to
a motorized hinge.
Trimesh reader/collider
Demonstrates th Wavefront obj reader and how to use a triangle mesh as a collider primitive.
- Start mesh-mesh_spiral.agxPy in agxViewer
- View source: mesh-mesh_spiral.agxPy Python script
Tracing surface of triangle mesh
Demonstrates how spheres are tracing/rotating against the profile of a triangle mesh.
- Start follow_surface.agxPy in agxViewer
- View source: follow_surface.agxPy (main Lua file)
Building a "crane" with Wires
This script creates a flexible crane with a wire. The flex in the two beams in the crane can be altered with the UP/DOWN/LEFT/RIGHT keys.
Shows how to:
- Create agxWire::Wire
- Render wires
- Route wire with nodes
- Work with WireWinchControllers to winch in/out wire.
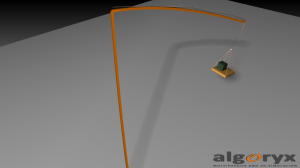
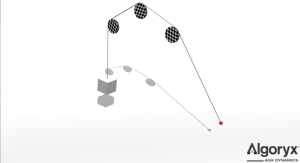
Rendering of rigid body trajectories
This script demonstrates how to render the trajectories for moving rigidbodies.
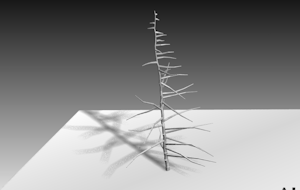
Modelling deformable trees
This script demonstrates how to use the agxModel::Tree class to model deformable trees.
Demonstration of a "jump request"
Sometimes it is necessary to move a part of a simulation to a different place.
It is important to keep the relative transformation and velocities intact.
This script demonstrates how to move bodies and a wire while retaining a stable simulation.
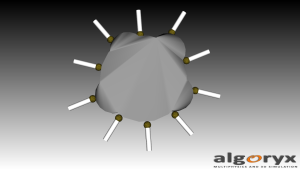
Rendering force arrows in 3D"
The class agxOSG::ForceArrowRenderer can be used to render forces, both contacts and constraint forces.
This example demonstrates how to use this class to illustrate forces in 3D.
Example use of Skybox and Cube mapping."
This example demonstrates various rendering effects available in agxOSG including:
- Skybox
- Environment mapping

Example of controlling AlgoryxLunarCruiser
This example demonstrates setting up a scene in python for the AlgoryxLunarCruiser OpenPLX model, with simple gamepad/keyboard controls using OpenPLX signals.
Keyboard bindings:
- Up/Down - Forward/Reverse
- Left/Right - Steer
Gamepad bindings:
- Right Trigger - Forward
- Left Trigger - Reverse
- Left Stick X - Steer
