Tutorials written in the scripting language Python
All Python based tutorials can be found in <agxDir>/data/python/tutorials.
Most of the scripts can be started both with the native python and agxViewer.
To run these tutorials, AGX needs to be installed on the
computer. The .agxPy file suffix is associated to
the application agxViewer which will be executed for
the links below.
If you want to start one of the scripts manually in a command window, just write:
agxviewer tutorials\tutorial1_graphics.agxPy
agxViewer starts by default in paused mode. Remember to press 'e' to start simulation.
Press '1' to reload the scenes.
Tutorial: Basic simulation
Create a basic simulation with bodies, geometries and
shapes.
Shows how to:
- Create a basic simulation with bodies, geometries and shapes.
- Can be started with the native python or agxViewer application. However, no graphics is generated in this script, so when you start it with agxViewer, you need to press 'g' to see the geometry.
Tutorial: Attaching graphical objects
Create bodies/geometries and attach rendering objects to
each of them.
Shows how to:
- Create a simulation including graphics which is loadable with agxViewer.
- Load a graphical object from a file, and connect it to a geometry so that it moves with the geometry.
This script can only be loaded with agxViewer, NOT
python.
Tutorial: Supporting both python and agxViewer
Create bodies/geometries and attach rendering objects to
each of them.
Shows how to:
- Demonstrates how to create a Python script which can be loaded both with the native python.exe and agxViewer.
- Use arguments when python is used.
- Start tutorial2_python3_agxViewer.agxPy in agxViewer
- View source code
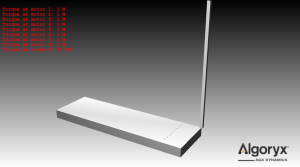
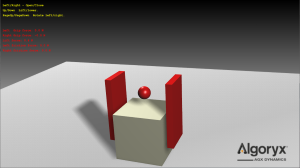
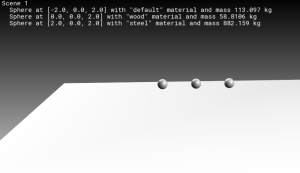
Tutorial: Events and reading forces
This tutorial show how to listen for simulation event and
read forces from contacts and constraints.
Shows how to:
- Create a StepEventListener to listen for events in the simulation loop
- Access contact data/forces and write them to the screen
- Get all constraints in a system
- Access constraint data and read forces
- Draw simple text onto the screen
Tutorial: Creating objects during runtime
This script randomly creates objects during runtime.
Shows how to:
- Use AutoSleep
- Create a StepEventListener to listen for events in the simulation loop
- Create and remove objects during runtime.
Tutorial: Read scenes from file and transform objects using Assemblies
- Read simulation data from .aagx file
- Group and move objects using agxSDK::Assembly
- Get objects from an Assembly
- Access data using names
Tutorial: Mesh Reader
- Read a mesh file from disk and create a TriangleMesh shape for collision detection
- Read a mesh file and use for rendering
Tutorial: Read keyboard events. Change shapes
Shows how to:
- agxSDK.GuiEventListener for listening to keyboard and mouse events
- Change a shape in size (radius of a sphere), including the graphics
Tutorial: Using iterative solver for contacts
Shows how to:
Use the iterative solver specified on a per-material
basis. The iterative solver does not give the same
precision as the direct, but is a lot faster for large
contact/friction system.
Also by using the ParallelPgs solver good performance can be gained with more than 1 thread.
Tutorial: Constraints
This tutorial demonstrates all the constraints available
in AGX.
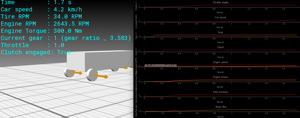
Tutorial: Tire model
This is a tutorial demonstrating how to use the TireModel class for simulating the wheels of a vehicle.
Control the car with up/down/left/right. If you have a gamepad connected it can be used to control the car.
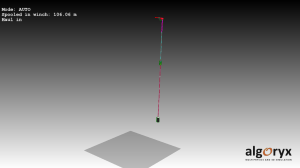
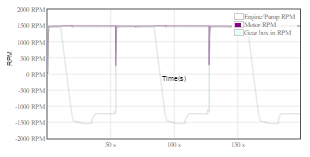
Tutorial: Hydraulic winch with plotting
This script demonstrates how to build a hydraulic driven
winch with wires. During simulation data will be plotted:
rpm, pressure, flow etc.
Included in the tutorial is:
- RPM controller (written in Python)
- Engine
- Hydraulic pump
- Shafts
- Relief valve
- GearBox
- Clutch
- WireWinchActuator
 |
 |
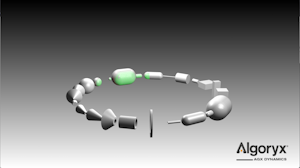
Tutorial: Cable
This script contains several scenes where each illustrate how to use the agxCable api.
Press key 1..7 to choose scene. Shows how to:
- Create and route a cable.
- Attach cable to objects.
- Set cable properties.
- Inspect dynamic state.
- Control initialization.
- Detect cable collisions.
- Attach objects on initialized cable.
View source code
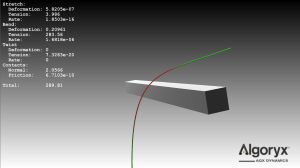
Tutorial: Cable Damage
This script demonstrates how to setup and use the CableDamage class available in AGX Dynamics.
Cable damage can measure the accumulated strain in a cable tue to bend/twist/stretch
Start tutorial_cableDamage.agxPy in agxViewerView source code
Tutorial: Cable Tunneling Guard
This script demonstrates how to setup and use the CableTunnelingGuard class available in AGX Dynamics and shows off a few examples of parameterizing the class to avoid certain types of tunneling.
Tunneling caused by low simulation frequencies can be reduced by using the CableTunnelingGuard class. It offers default values to suit many situations but also exposes parameters to more aggressively prevent tunneling, if needed.
Start tutorial_cable_tunneling_guard.agxPy in agxViewerView source code
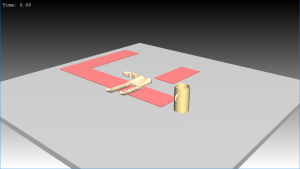
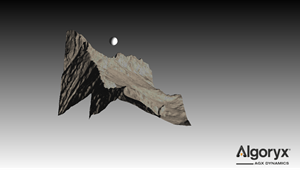
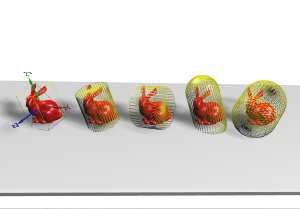
Tutorial: Fracture
This tutorial shows how to use the FractureGenerator class for breaking and fracturing geometries
in the simulation using 3D Voronoi tessellation.
Press key 1..4 to choose scene.
Start tutorial_fracture.agxPy in agxViewerView source code
Tutorial: Gearbox
Required licenses: agxDriveTrainThis script demonstrates how to create a series of hinges with motors, where all hinge output shafts are connected to one gearbox. Resulting in one hinge driven by the resulting torque of the gearbox output shaft.
Increase/decrease torque using up/down keys
Start tutorial_gearbox.agxPy in agxViewerView source code
Tutorial: Brake
Required licenses: agxDriveTrainThis tutorial demonstrates the creation of a powertrain system consisting of multiple components working in sequence. The system starts with a combustion engine, which is connected to a dry clutch. The clutch, in turn, is linked to a brake, and the system ultimately drives a wheel actuator. The wheel actuator is represented by a hinge joint that connects to the world, simulating the rotational motion of a wheel.
Start tutorial_driveTrain_brake.agxPy in agxViewerView source code

Tutorial: Conveyor belt simulation
This scene demonstrates how to create a surface velocity conveyor belt # in order to set up a basic conveyor belt simulation transporting goods.
Start tutorial_surface_velocity_conveyor_belt.agxPy in agxViewerView source code
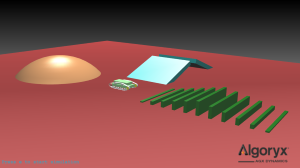
Tutorial: Demonstration of various contact friction models
This scene demonstrates how to best make use of the various contact friction models available in AGX Dynamics
Start tutorial_direct_iterative_solver.agxPy in agxViewerView source code

Tutorial: Grasping hand
This script shows you how to set up a scene with accurate frictional contact simulation using the DIRECT solver
View source code:
 |
Tutorial: Using Virtual Inertia
This file demonstrates the functionality of the virtual inertia class that adds virtual inertia elements to a constraint that will add extra resistance to translational and rotational movements in the general constraint axis. This can be used to emulate mechanisms modeled with constraints that have internal inertia
Start tutorial_virtualInertia.agxPy in agxViewerView source code
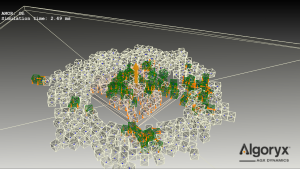
Tutorial: Using AMOR (Automatic MOdel Reduction) for speeding up simulation
This demonstrates how to use MergedBody and MergeSplitHandler to automatically simplify a scene to achieve speedup.
Start tutorial_mergedBody1.agxPy in agxViewerView source code
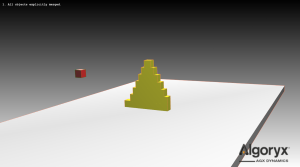
Tutorial: Improve performance in a dynamic scene with many bodies
This scene demonstrates how AMOR can speed up simulation in a scene where many bodies are created in a dynamic scene with a spinning "table".
Start tutorial_AMOR.agxPy in agxViewerView source code
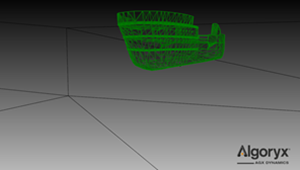
Tutorial: Using agxModel::Track to model a tracked vehicle
This tutorial will show you how to use the agxModel::Track class to model a tracked vehicle/crawler.
Start tutorial_trackedVehicle.agxPy in agxViewerView source code
Tutorial: Combustion Engine
This tutorial illustrates how to use the agxDriveTrain.CombustionEngine class for simulating an engine..
Start
tutorial_driveTrain_combustionEngine.agxPy in agxViewer
View
source code
Tutorial: Modelling a basic car with WheelJoint
This scripts demonstrates how to use the WheelJoint constraint for modelling the ackerman steering system including suspension.
Start tutorial_wheel_joint.agxPy in agxViewerView source code
Tutorial: Demonstration of various steering models
This script demonstrates the different steering models available for a WheelJoint:
- AckermannSteering
- BellCrankSteering
- ShortRackPinionSteering
- DavisSteering
View source code
Tutorial: Set robot pose
Demonstrates how to initialize and set up a simulation using multiple Panda robots loaded from URDF. We compute and apply forward kinematics based on random joint configurations, ensuring valid poses by respecting joint limits.
Tutorial: Gravity Compensation
Shows how to set up and perform gravity compensation with a Franka Emika Panda robot. We use inverse dynamics to calculate the torques needed at each joint to maintain the robot's position without acceleration, counteracting the effects of gravity. These torques are then applied to the robot's joints, ensuring it holds its pose.

Tutorial: Trajectory Tracking
This tutorial demonstrates how to generate straight-line trajectories in joint and task space and track them using feed-forward torque control. We compute the torques using inverse dynamics to actuate the Panda robot.
Tutorial: Differential Kinematics
Demonstrates how to track a moving target using position-based servoing. Postion-based servoing computes the tracking error between the end-effector's and object's pose. It then uses differential kinematics to compute the manipulator Jacobian and solves for the desired joint velocities. These joint velocities are input to the actuators of the Panda robot.
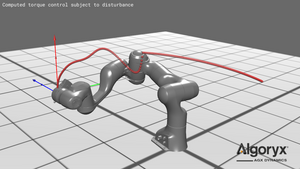
Tutorial: Computed Torque Control
This script shows how to implement computed torque control, or the inverse dynamics controller, to track a trajectory. Along the trajectory, we unexpectedly let the robot collide with an object, causing it to diverge from the intended path. However, since computed torque control relies on feedback, it recovers gracefully.
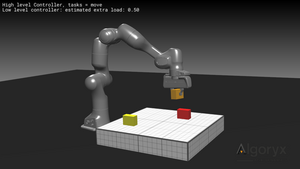
Tutorial: Pick-and-Place
This tutorial shows how to control a Panda robot to pick up boxes through frictional contacts and stack them. We use two controllers to manage the robot's motion. A high-level controller handles tasks related to the gripper and determines the robot's desired trajectory. A low-level controller tracks the target joint angles provided by the high-level controller and uses a force/torque sensor to estimate the load on the tool when moving different objects.
Tutorial: Controlled Robot using electric motor model
This script demonstrates how to model electric motors for a controlled robot.

Tutorial: Modelling a Robot and controlling it using a PID controller
This tutorial demonstrates how a robot can be modelled from individual parts. It also show how an ordinary PID controller can be used to control the movements of the robot to follow a predefined trajectory read from a file. PID controller chapter in the User manual goes through this example in more detail
Start tutorial_robot_pid_control.agxPy in agxViewerView source code
Tutorial: Simulating a robot suction gripper
This tutorial demonstrates how to model a custom suction gripper using the
agxModel::SuctionGripperclass. Start tutorial_custom_suction_gripper.agxPy in agxViewer
View source code
Tutorial: Modelling a gripping mechanism
This tutorial illustrates how to model a gripping device. To be able to pick up an object using only friction, you will need to consider the material/solve model for the contacts between the gripper and the lifted object
Start tutorial_gripper.agxPy in agxViewerView source code
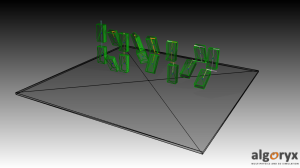
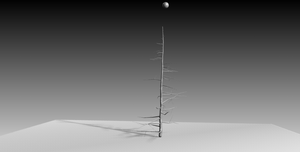
Tutorial: Simulating Trees
This tutorial will demonstrate how to use the agxModel::Tree class to simulate a flexible tree structures with stem and branches. The trees can be broken into parts because of collisions or forces.
Start tutorial_tree.agxPy in agxViewerView source code
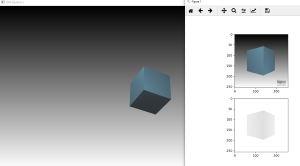
Tutorial: Render the scene to an image
This script demonstrates how to render color and depth buffer to image If matplotlib is present it shows the buffers in a figure.
Start tutorial_renderToImage.agxPy in agxViewerView source code
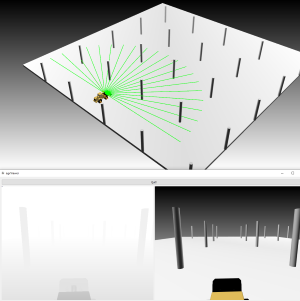
Tutorial: Lidar
This script shows how to create a Lidar sensor and read back data (point cloud) from it. The Lidar uses GPU accelerated ray tracing.
Note: The Lidar simulation requires a graphics card that supports CUDA.
Start tutorial_lidar.agxPy in agxViewerView source code
Tutorial: Lidar and Camera sensors
This script shows how to create an image based Lidar sensor together with depth and color cameras attached to a moving body. Note that this tutorial does not use the now recommended Lidar sensor, part of the agxSensor library which uses GPU accelerated ray tracing. See tutorial "Lidar" above for details of that Lidar sensor.
Start tutorial_lidar_and_camera_sensors.agxPy in agxViewerView source code
Tutorial: Point cloud over ROS2
This script shows how to publish lidar output data over ROS2 using agxROS2 and the utility function
agxROS2.convertLidarOutput()to convert lidar output. Start tutorial_pointcloud_over_ros2.agxPy in agxViewer
View source code
Tutorial: Terrain from GeoTIFF
This tutorial demonstrates how to create a terrain from a GeoTIFF DEM (Digital Elevation Model).
Required licenses: agxTerrain
Shows how to:
- Load a GeoTIFF file and create an agxTerrain from it.
- Implement a custom HeightDataResampler for bilinear interpolation.
- Read RGB data from a GeoTIFF and apply it as a texture.
View source code
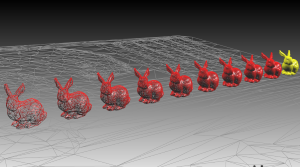
Tutorial: Mesh reduction
This tutorial demonstrates how to use the
agxUtil.reduceMesh()function for reduction of triangle meshes. Start tutorial_reduce_mesh.agxPy in agxViewer
View source code
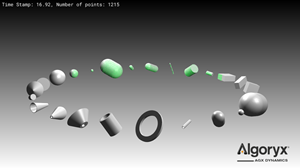
Tutorial: Polyhedra generation
This tutorial demonstrates how to use the
agxUtil.PrimitiveMeshGenerator.generateVoronoiPolyhedraMeshto generate a polyhedra mesh from a randomly generated Voronoi Diagram. Start tutorial_polyhedra_generation.agxPy in agxViewer
View source code
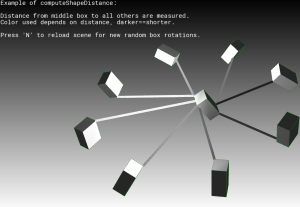
Tutorial: Closest shape distance
This tutorial show how you can use the
agxCollide.computeShapeDistancefunction to calculate the shortest distance between convex shapes. Start tutorial_shape_distance.agxPy in agxViewer
View source code
Tutorial: Creating oriented volumes
This tutorial show how you can use the
agxUtil.createOrientedBox, agxUtil.createOrientedCylinderand
agxUtil.createOrientedCapsuleto compute oriented bounding volumes based on a set of vertices. Start tutorial_create_bounding_volume.agxPy in agxViewer
View source code
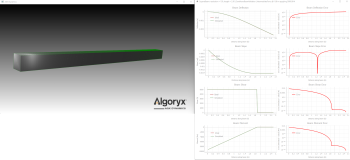
Tutorial: Simulating a Beam
This tutorial shows how to use the agxModel::Beam class.
Start tutorial__beam.agxPy in agxViewerView source code
Tutorial: Simulating a robot suction gripper
This tutorial demonstrates how to model a custom suction gripper using the
agxModel::SuctionGripperclass. Start tutorial_custom_suction_gripper.agxPy in agxViewer
View source code
Tutorial: Material library
This script demonstrates how to use predefined materials from the Material Library for various objects.
Start tutorial_material_library.agxPy in agxViewerView source code
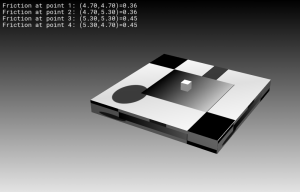
Tutorial: Per contact point friction
This script demonstrates how a per contact point friction model can be setup using ContactEventListener. A texture is used as a lookup table for getting non-homogeneous friction over the surface of a box. The lookup into the friction texture is based on projection down to the x/y plane.
Start tutorial_per_contact_point_friction.agxPy in agxViewerView source code
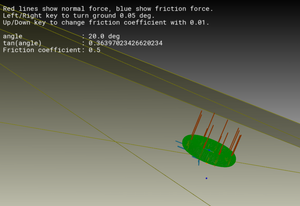
Tutorial: Friction
This demonstrates basic friction modeling. The angle of the plane can be altered using left/right key. Friction coefficient can be altered using up/down key.
Start tutorial_friction.agxPy in agxViewerView source code
Tutorial: BallJoint Secondary Constraints
This script demonstrates the basics of how to set up and use the secondary constraints of a ball joint, specifically cone limit, twist range and friction controller constraints.
Start tutorial_balljoint_secondary_constraints.agxPy in agxViewerView source code
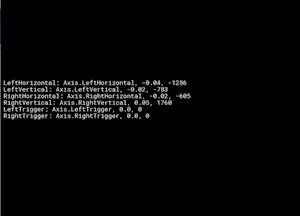
Tutorial: Gamepad
This script demonstrates how to use the Python API for accessing joystick/gamepad in a simulation.
Start tutorial_gamepad.agxPy in agxViewerView source code
Tutorial: Recompute texture coordinates for a mesh model.
This example demonstrates a tool that will recompute texture coordinates from a texture atlas.

Tutorial: Center of buoyancy
This script demonstrates the basics of enabling and accessing the position of center of buoyancy in a hydrodynamics scene.
Start tutorial_centerOfBuoyancy.agxPy in agxViewerView source code
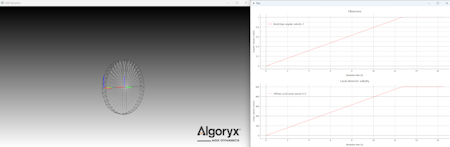
Tutorial: ObserverFrame
ObserverFrame can be used to measure data for a rigid body including, position, velocity and acceleration.
Start tutorial_observerFrame.agxPy in agxViewerView source code
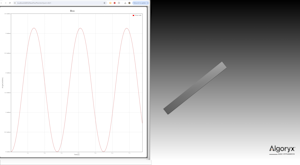
Tutorial: agxPlot
agxPlot is an API (available in Python, C++, C#) for easy plotting of data. It uses a WebAPI for the actual plotting.
Start tutorial_agxPlot.agxPy in agxViewerView source code
Tutorial: Change machine pose - ReconfigureRequest
The reconfigure request is a utility class in agxUtil with functionality to compute new transforms for a collection of bodies given a set of values for constraint angles.
This tutorial shows how it can be used to change the pose of a wheel loader, an excavator as well as a robot.
The tutorial also shows extra handling which can be needed after updating many body transforms to maintain the simulation in a good state.
Start tutorial_machine_reconfiguration.agxPy in agxViewerView source code
Tutorial: Path tracking with Pure Pursuit
Required licenses: agxControl The first scene in the tutorial uses a tracked vehicle where the tracks also requires the agxTracks license.
This tutorial shows how pure pursuit can be used for two different kinds of vehicles to compute steering information so that a path is tracked.
Start tutorial_purepursuit.agxPy in agxViewerView source code

Tutorial: Deformable Objects
A robot end effector with four deformable "fingers". The fingers are deformable objects merged with the base and there are wires (with winches) routed in the deformable objects enabling opening and closing of the tool/hand.
Start tutorial_deformableObjects.agxPy in agxViewerView source code
