2024
|
 | Thoeni, Klaus; Hartmann, P; Berglund, Tomas; Servin, Martin: Edge protection along haul roads in mines and quarries: A rigorous study based on full-scale testing and numerical modelling. In: Journal of Rock Mechanics and Geotechnical Engineering, 2024, ISBN: 1674-7755. @article{Thoeni2024,
title = {Edge protection along haul roads in mines and quarries: A rigorous study based on full-scale testing and numerical modelling},
author = {Klaus Thoeni and P Hartmann and Tomas Berglund and Martin Servin},
doi = {https://doi.org/10.1016/j.jrmge.2024.10.005},
isbn = {1674-7755},
year = {2024},
date = {2024-10-11},
urldate = {2024-10-11},
journal = {Journal of Rock Mechanics and Geotechnical Engineering},
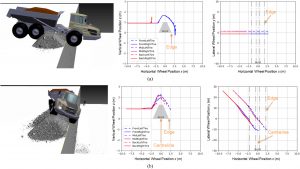
abstract = {Safety berms (also called safety bunds or windrows), widely employed in surface mining and quarry operations, are typically designed based on rules of thumb. Despite having been used by the industry for more than half a century and accidents happening regularly, their behaviour is still poorly understood. This paper challenges existing practices through a comprehensive investigation combining full-scale experiments and advanced numerical modelling. Focusing on a Volvo A45G articulated dump truck (ADT) and a CAT 773B rigid dump truck (RDT), collision scenarios under various approach conditions and different safety berm geometries and materials are rigorously examined. The calibrated numerical model is used to assess the energy absorption capacity of safety berms with different geometry and to predict a critical velocity for a specific scenario. Back analysis of an actual fatal accident indicated that an ADT adhering to the speed limit could not be stopped by the safety berm designed under current guidelines. The study highlights the importance of considering the entire geometry and the mass and volume of the material used to build the safety berm alongside the speed and approach conditions of the machinery. The findings of the study enable operators to set speed limits based on specific berm geometries or adapt safety berm designs to match speed constraints for specific machinery. This will reduce the risk of fatal accidents and improve haul road safety.},
keywords = {Algoryx, External},
pubstate = {published},
tppubtype = {article}
}
Safety berms (also called safety bunds or windrows), widely employed in surface mining and quarry operations, are typically designed based on rules of thumb. Despite having been used by the industry for more than half a century and accidents happening regularly, their behaviour is still poorly understood. This paper challenges existing practices through a comprehensive investigation combining full-scale experiments and advanced numerical modelling. Focusing on a Volvo A45G articulated dump truck (ADT) and a CAT 773B rigid dump truck (RDT), collision scenarios under various approach conditions and different safety berm geometries and materials are rigorously examined. The calibrated numerical model is used to assess the energy absorption capacity of safety berms with different geometry and to predict a critical velocity for a specific scenario. Back analysis of an actual fatal accident indicated that an ADT adhering to the speed limit could not be stopped by the safety berm designed under current guidelines. The study highlights the importance of considering the entire geometry and the mass and volume of the material used to build the safety berm alongside the speed and approach conditions of the machinery. The findings of the study enable operators to set speed limits based on specific berm geometries or adapt safety berm designs to match speed constraints for specific machinery. This will reduce the risk of fatal accidents and improve haul road safety. |
 | Aoshima, Koji; Fälldin, Arvid; Wadbro, Eddie; Servin, Martin: World modeling for autonomous wheel loaders. In: Automation, vol. 5, iss. 3, pp. 259-281, 2024. @article{aoshima:2023:pmh,
title = {World modeling for autonomous wheel loaders},
author = {Koji Aoshima and Arvid Fälldin and Eddie Wadbro and Martin Servin},
url = {https://www.mdpi.com/2673-4052/5/3/16
https://www.mdpi.com/2673-4052/5/3/16/pdf
http://umit.cs.umu.se/wl-predictor/},
doi = {10.3390/automation5030016},
year = {2024},
date = {2024-07-07},
urldate = {2023-10-02},
journal = {Automation},
volume = {5},
issue = {3},
pages = {259-281},
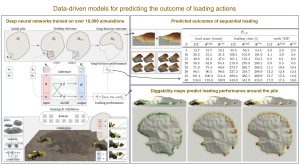
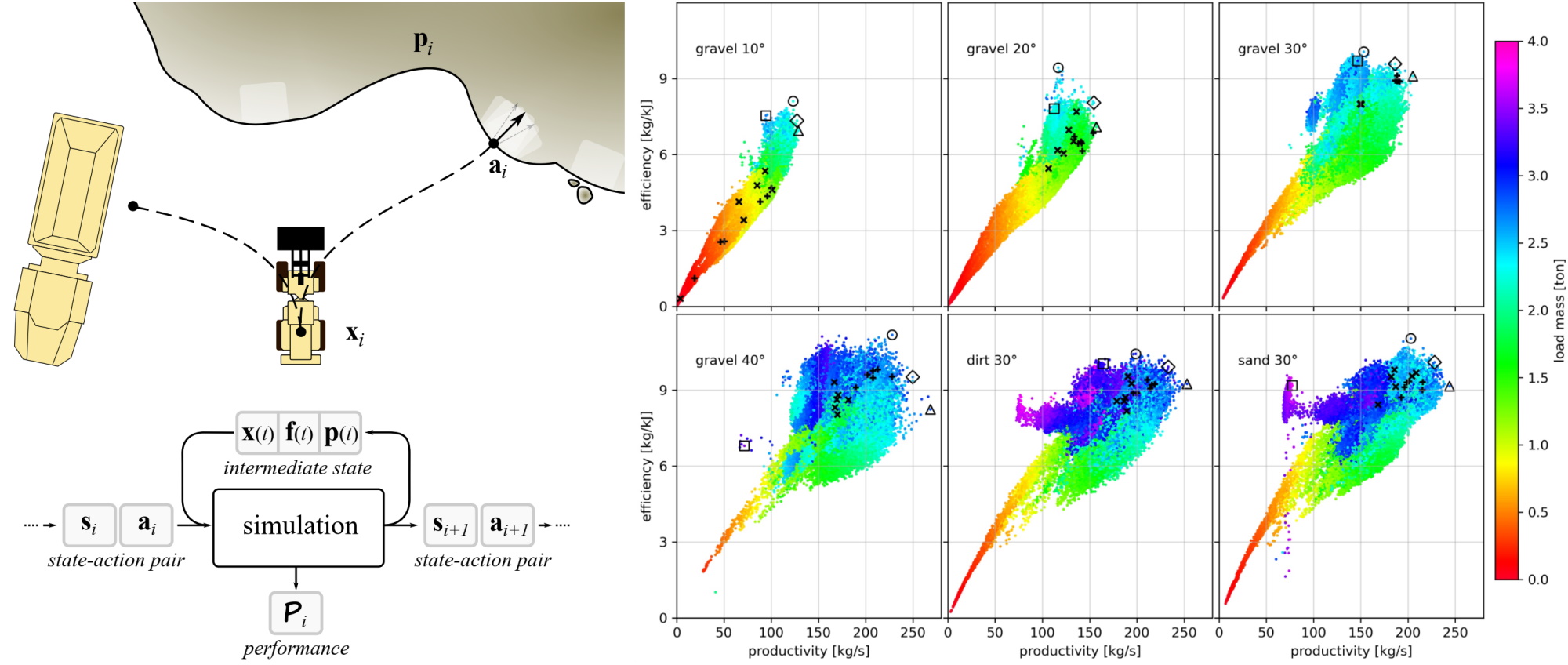
abstract = {This paper presents a method for learning world models for wheel loaders performing automatic loading actions on a pile of soil. Data-driven models were learned to output the resulting pile state, loaded mass, time, and work for a single loading cycle given inputs that include a heightmap of the initial pile shape and action parameters for an automatic bucket-filling controller. Long-horizon planning of sequential loading in a dynamically changing environment is thus enabled as repeated model inference. The models, consisting of deep neural networks, were trained on data from a 3D multibody dynamics simulation of over 10,000 random loading actions in gravel piles of different shapes. The accuracy and inference time for predicting the loading performance and the resulting pile state were, on average, 95% in 1.2 ms and 97% in 4.5 ms, respectively. Long-horizon predictions were found feasible over 40 sequential loading actions.},
keywords = {Algoryx, External},
pubstate = {published},
tppubtype = {article}
}
This paper presents a method for learning world models for wheel loaders performing automatic loading actions on a pile of soil. Data-driven models were learned to output the resulting pile state, loaded mass, time, and work for a single loading cycle given inputs that include a heightmap of the initial pile shape and action parameters for an automatic bucket-filling controller. Long-horizon planning of sequential loading in a dynamically changing environment is thus enabled as repeated model inference. The models, consisting of deep neural networks, were trained on data from a 3D multibody dynamics simulation of over 10,000 random loading actions in gravel piles of different shapes. The accuracy and inference time for predicting the loading performance and the resulting pile state were, on average, 95% in 1.2 ms and 97% in 4.5 ms, respectively. Long-horizon predictions were found feasible over 40 sequential loading actions. |
 | Aoshima, Koji; Servin, Martin: Examining the simulation-to-reality gap of a wheel loader digging in deformable terrain. In: Multibody System Dynamics, 2024. @article{aoshima2023sim2real,
title = {Examining the simulation-to-reality gap of a wheel loader digging in deformable terrain},
author = {Koji Aoshima and Martin Servin},
url = {https://doi.org/10.1007/s11044-024-10005-5
https://arxiv.org/abs/2310.05765
http://umit.cs.umu.se/wl-sim-to-real/},
doi = {doi.org/10.1007/s11044-024-10005-5},
year = {2024},
date = {2024-06-30},
urldate = {2023-10-10},
journal = {Multibody System Dynamics},
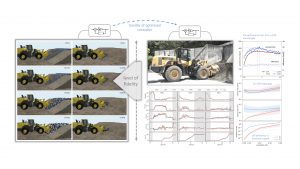
abstract = {We investigate how well a physics-based simulator can replicate a real wheel loader performing bucket filling in a pile of soil. The comparison is made using field test time series of the vehicle motion and actuation forces, loaded mass, and total work. The vehicle was modeled as a rigid multibody system with frictional contacts, driveline, and linear actuators. For the soil, we tested discrete element models of different resolutions, with and without multiscale acceleration. The spatio-temporal resolution ranged between 50-400 mm and 2-500 ms, and the computational speed was between 1/10,000 to 5 times faster than real- time. The simulation-to-reality gap was found to be around 10% and exhibited a weak dependence on the level of fidelity, e.g., compatible with real-time simulation. Furthermore, the sensitivity of an optimized force feedback controller under transfer between different simulation domains was investigated. The domain bias was observed to cause a performance reduction of 5% despite the domain gap being about 15%.},
keywords = {Algoryx, External},
pubstate = {published},
tppubtype = {article}
}
We investigate how well a physics-based simulator can replicate a real wheel loader performing bucket filling in a pile of soil. The comparison is made using field test time series of the vehicle motion and actuation forces, loaded mass, and total work. The vehicle was modeled as a rigid multibody system with frictional contacts, driveline, and linear actuators. For the soil, we tested discrete element models of different resolutions, with and without multiscale acceleration. The spatio-temporal resolution ranged between 50-400 mm and 2-500 ms, and the computational speed was between 1/10,000 to 5 times faster than real- time. The simulation-to-reality gap was found to be around 10% and exhibited a weak dependence on the level of fidelity, e.g., compatible with real-time simulation. Furthermore, the sensitivity of an optimized force feedback controller under transfer between different simulation domains was investigated. The domain bias was observed to cause a performance reduction of 5% despite the domain gap being about 15%. |
2022
|
 | Marklund, Hannes: Expressibility of multiscale physics in deep networks. Department of Physics, Umeå University, 2022. @mastersthesis{itembibentry{marklund2022expressibility},
title = {Expressibility of multiscale physics in deep networks},
author = {Hannes Marklund},
url = {https://umu.diva-portal.org/smash/record.jsf?pid=diva2:1678353},
year = {2022},
date = {2022-06-10},
school = {Department of Physics, Umeå University},
abstract = {Motivated by the successes in the field of deep learning, the scientific community has been increasingly interested in neural networks that are able to reason about physics. As neural networks are universal approximators, they could in theory learn representations that are more efficient than traditional methods whenever improvements are theoretically possible. This thesis, done in collaboration with Algoryx, serves both as a review of the current research in this area and as an experimental investigation of a subset of the proposed methods. We focus on how useful these methods are as textit{learnable simulators} of mechanical systems that are possibly constrained and multiscale. The experimental investigation considers low-dimensional problems with training data generated by either custom numerical integration or by use of the physics engine AGX Dynamics. A good learnable simulator should express some important properties such as being stable, accurate, generalizable, and fast. Importantly, a generalizable simulator must be able to represent reconfigurable environments, requiring a model known as a graph neural network (GNN). The experimental results show that black-box neural networks are limited to approximate physics in the states it has been trained on. The results also suggest that traditional message-passing GNNs have a limited ability to represent more challenging multiscale systems. This is currently the most widely used method to realize GNNs and thus raises concern as there is not much to be gained by investing time into a method with fundamental limitations. },
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Motivated by the successes in the field of deep learning, the scientific community has been increasingly interested in neural networks that are able to reason about physics. As neural networks are universal approximators, they could in theory learn representations that are more efficient than traditional methods whenever improvements are theoretically possible. This thesis, done in collaboration with Algoryx, serves both as a review of the current research in this area and as an experimental investigation of a subset of the proposed methods. We focus on how useful these methods are as textit{learnable simulators} of mechanical systems that are possibly constrained and multiscale. The experimental investigation considers low-dimensional problems with training data generated by either custom numerical integration or by use of the physics engine AGX Dynamics. A good learnable simulator should express some important properties such as being stable, accurate, generalizable, and fast. Importantly, a generalizable simulator must be able to represent reconfigurable environments, requiring a model known as a graph neural network (GNN). The experimental results show that black-box neural networks are limited to approximate physics in the states it has been trained on. The results also suggest that traditional message-passing GNNs have a limited ability to represent more challenging multiscale systems. This is currently the most widely used method to realize GNNs and thus raises concern as there is not much to be gained by investing time into a method with fundamental limitations. |
 | Despaigne, Henrik: Fibre-based preconditioner for granular matter simulation. Department of Computing Science, Umeå University, 2022. @mastersthesis{Despaigne2022,
title = {Fibre-based preconditioner for granular matter simulation},
author = {Henrik Despaigne},
url = {https://www.diva-portal.org/smash/record.jsf?pid=diva2:1638655
https://www.diva-portal.org/smash/get/diva2:1638655/FULLTEXT01.pdf},
year = {2022},
date = {2022-02-18},
school = {Department of Computing Science, Umeå University},
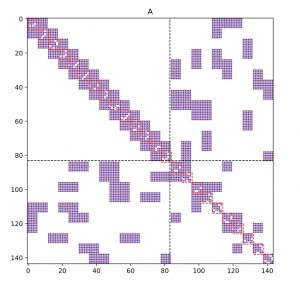
abstract = {Simulating granular media at large scales is hard to do because of ill-conditioning of the associated linear systems and the ineffectiveness of available iterative methods. One common way to improve iterative methods is to use a preconditioner which involves finding a good approximation of a linear system A. A good preconditioner will improve the condition number of A. If a linear system has a set of large eigenvalues of comparable magnitude, and the rest of the eigenvalues are small, so that the gap between the set of large eigenvalues and the small ones is large, the ill-conditioning caused by the small eigenvalues will not appear in the early iterations. We investigate a new fibre-based preconditioner that involves finding chains of contacting particles along the particles of a granular medium and reordering the system, which leads to a diagonal preconditioner. We show its effects on the relative residual and error of the velocity on linear systems where the ill-conditioning is caused by a big gap between a set of large eigenvalues and small eigenvalues for three differentiterative methods: Uzawa, the Conjugate Residual (CR) and the Minimum ResidualMethod (MINRES).},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Simulating granular media at large scales is hard to do because of ill-conditioning of the associated linear systems and the ineffectiveness of available iterative methods. One common way to improve iterative methods is to use a preconditioner which involves finding a good approximation of a linear system A. A good preconditioner will improve the condition number of A. If a linear system has a set of large eigenvalues of comparable magnitude, and the rest of the eigenvalues are small, so that the gap between the set of large eigenvalues and the small ones is large, the ill-conditioning caused by the small eigenvalues will not appear in the early iterations. We investigate a new fibre-based preconditioner that involves finding chains of contacting particles along the particles of a granular medium and reordering the system, which leads to a diagonal preconditioner. We show its effects on the relative residual and error of the velocity on linear systems where the ill-conditioning is caused by a big gap between a set of large eigenvalues and small eigenvalues for three differentiterative methods: Uzawa, the Conjugate Residual (CR) and the Minimum ResidualMethod (MINRES). |
 | Wiberg, Viktor; Wallin, Erik; Servin, Martin; Nordfjell, Tomas: Control of rough terrain vehicles using deep reinforcement learning. In: IEEE Robotics and Automation Letters, vol. 7, no. 1, pp. 390-397, 2022. @article{wiberg2021b,
title = {Control of rough terrain vehicles using deep reinforcement learning},
author = {Viktor Wiberg and Erik Wallin and Martin Servin and Tomas Nordfjell},
url = {https://arxiv.org/abs/2107.01867
http://umit.cs.umu.se/control_terrain/},
doi = {https://ieeexplore.ieee.org/document/9611016},
year = {2022},
date = {2022-01-01},
journal = {IEEE Robotics and Automation Letters},
volume = {7},
number = {1},
pages = {390-397},
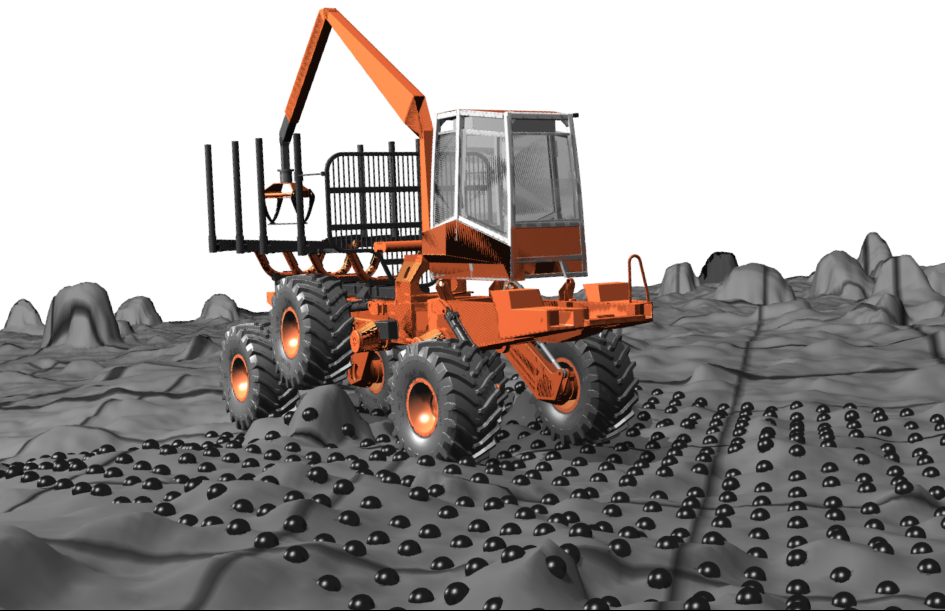
abstract = {We explore the potential to control terrain vehicles using deep reinforcement in scenarios where human operators and traditional control methods are inadequate. This letter presents a controller that perceives, plans, and successfully controls a 16-tonne forestry vehicle with two frame articulation joints, six wheels, and their actively articulated suspensions to traverse rough terrain. The carefully shaped reward signal promotes safe, environmental, and efficient driving, which leads to the emergence of unprecedented driving skills. We test learned skills in a virtual environment, including terrains reconstructed from high-density laser scans of forest sites. The controller displays the ability to handle obstructing obstacles, slopes up to 27°, and a variety of natural terrains, all with limited wheel slip, smooth, and upright traversal with intelligent use of the active suspensions. The results confirm that deep reinforcement learning has the potential to enhance control of vehicles with complex dynamics and high-dimensional observation data compared to human operators or traditional control methods, especially in rough terrain.
},
howpublished = { arXiv:2107.01867},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
We explore the potential to control terrain vehicles using deep reinforcement in scenarios where human operators and traditional control methods are inadequate. This letter presents a controller that perceives, plans, and successfully controls a 16-tonne forestry vehicle with two frame articulation joints, six wheels, and their actively articulated suspensions to traverse rough terrain. The carefully shaped reward signal promotes safe, environmental, and efficient driving, which leads to the emergence of unprecedented driving skills. We test learned skills in a virtual environment, including terrains reconstructed from high-density laser scans of forest sites. The controller displays the ability to handle obstructing obstacles, slopes up to 27°, and a variety of natural terrains, all with limited wheel slip, smooth, and upright traversal with intelligent use of the active suspensions. The results confirm that deep reinforcement learning has the potential to enhance control of vehicles with complex dynamics and high-dimensional observation data compared to human operators or traditional control methods, especially in rough terrain.
|
2021
|
 | Aoshima, Koji; Servin, Martin; Wadbro, Eddie: Simulation-Based Optimization of High-Performance Wheel Loading. Proceedings of the 38th International Symposium on Automation and Robotics in Construction (ISARC), International Association for Automation and Robotics in Construction (IAARC), 2021, ISBN: 978-952-69524-1-3. @conference{Aoshima2021,
title = {Simulation-Based Optimization of High-Performance Wheel Loading},
author = {Koji Aoshima and Martin Servin and Eddie Wadbro},
editor = {Feng, Chen and Linner, Thomas and Brilakis, Ioannis and Castro, Daniel and Chen, Po-Han and Cho, Yong and Du, Jing and Ergan, Semiha and Garcia de Soto, Borja and Gaparík, Jozef and Habbal, Firas and Hammad, Amin and Iturralde, Kepa and Bock, Thomas and Kwon, Soonwook and Lafhaj, Zoubeir and Li, Nan and Liang, Ci-Jyun and Mantha, Bharadwaj and Ng, Ming Shan and Hall, Daniel and Pan, Mi and Pan, Wei and Rahimian, Farzad and Raphael, Benny and Sattineni, Anoop and Schlette, Christian and Shabtai, Isaac and Shen, Xuesong and Tang, Pingbo and Teizer, Jochen and Turkan, Yelda and Valero, Enrique and Zhu, Zhenhua},
url = {https://www.iaarc.org/publications/2021_proceedings_of_the_38th_isarc/simulation_based_optimization_of_high_performance_wheel_loading.html
https://arxiv.org/abs/2107.14615
http://umit.cs.umu.se/hp_loading/},
doi = {10.22260/ISARC2021/009310.22260/ISARC2021/0093},
isbn = {978-952-69524-1-3},
year = {2021},
date = {2021-08-02},
booktitle = {Proceedings of the 38th International Symposium on Automation and Robotics in Construction (ISARC)},
pages = {688-695},
publisher = {International Association for Automation and Robotics in Construction (IAARC)},
abstract = {Having smart and autonomous earthmoving in mind, we explore high-performance wheel loading in a simulated environment. This paper introduces a wheel loader simulator that combines contacting 3D multibody dynamics with a hybrid continuum-particle terrain model, supporting realistic digging forces and soil displacements at real-time performance. A total of 270,000 simulations are run with different loading actions, pile slopes, and soil to analyze how they affect the loading performance. The results suggest that the preferred digging actions should preserve and exploit a steep pile slope. High digging speed favors high productivity, while energy-efficient loading requires a lower dig speed.},
howpublished = {38th International Symposium on Automation and Robotics in Construction (ISARC), Dubai, UAE (2021). arXiv:2107.14615 },
keywords = {Algoryx, External},
pubstate = {published},
tppubtype = {conference}
}
Having smart and autonomous earthmoving in mind, we explore high-performance wheel loading in a simulated environment. This paper introduces a wheel loader simulator that combines contacting 3D multibody dynamics with a hybrid continuum-particle terrain model, supporting realistic digging forces and soil displacements at real-time performance. A total of 270,000 simulations are run with different loading actions, pile slopes, and soil to analyze how they affect the loading performance. The results suggest that the preferred digging actions should preserve and exploit a steep pile slope. High digging speed favors high productivity, while energy-efficient loading requires a lower dig speed. |
 | Servin, Martin; Westerlund, Folke; Wallin, Erik: Digital twins with distributed particle simulation for mine-to-mill material tracking. In: Minerals, vol. 11, no. 5, pp. 524, 2021. @article{Servin2021b,
title = {Digital twins with distributed particle simulation for mine-to-mill material tracking},
author = {Martin Servin and Folke Westerlund and Erik Wallin},
url = {https://www.mdpi.com/2075-163X/11/5/524
https://arxiv.org/pdf/2104.09111.pdf},
doi = {https://doi.org/10.3390/min11050524},
year = {2021},
date = {2021-04-19},
journal = {Minerals},
volume = {11},
number = {5},
pages = {524},
abstract = {Systems for transport and processing of granular media are challenging to analyse, operate and optimise. In the mining and mineral processing industries these systems are chains of pro- cesses with complex interplay between the equipment, control, and the processed material. The material properties have natural variations that are usually only known at certain locations. Therefore, we explore a material-oriented approach to digital twins with a particle representa- tion of the granular media. In digital form, the material is treated as pseudo-particles, each representing a large collection of real particles of various sizes, shapes and, mineral properties. Movements and changes in the state of the material are determined by the combined data from control systems, sensors, vehicle telematics, and simulation models at locations where no real sensors can see. The particle-based representation enables material tracking along the chain of processes. Each digital particle can act as a carrier of observational data generated by the equipment as it interacts with the real material. This makes it possible to better learn material properties from process observations, and to predict the effect on downstream processes. We test the technique on a mining simulator and demonstrate analysis that can be performed using data from cross-system material tracking.
},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
Systems for transport and processing of granular media are challenging to analyse, operate and optimise. In the mining and mineral processing industries these systems are chains of pro- cesses with complex interplay between the equipment, control, and the processed material. The material properties have natural variations that are usually only known at certain locations. Therefore, we explore a material-oriented approach to digital twins with a particle representa- tion of the granular media. In digital form, the material is treated as pseudo-particles, each representing a large collection of real particles of various sizes, shapes and, mineral properties. Movements and changes in the state of the material are determined by the combined data from control systems, sensors, vehicle telematics, and simulation models at locations where no real sensors can see. The particle-based representation enables material tracking along the chain of processes. Each digital particle can act as a carrier of observational data generated by the equipment as it interacts with the real material. This makes it possible to better learn material properties from process observations, and to predict the effect on downstream processes. We test the technique on a mining simulator and demonstrate analysis that can be performed using data from cross-system material tracking.
|
 | Servin, Martin; Götz, Holger; Berglund, Tomas; Wallin, Erik: Towards a graph neural network solver for granular dynamics. VII International Conference on Particle-Based Methods (PARTICLES 2021), 2021. @conference{servintowards,
title = {Towards a graph neural network solver for granular dynamics},
author = {Martin Servin and Holger Götz and Tomas Berglund and Erik Wallin},
url = {https://www.researchgate.net/profile/Martin-Servin/publication/350089857_Towards_a_graph_neural_network_solver_for_granular_dynamics/links/6050749892851cd8ce445ca6/Towards-a-graph-neural-network-solver-for-granular-dynamics.pdf},
year = {2021},
date = {2021-03-01},
booktitle = {VII International Conference on Particle-Based Methods (PARTICLES 2021)},
abstract = {The discrete element method (DEM) is a versatile but computationally intensive method for granular dynamics simulation. We investigate the possibility of accelerating DEM simulations using graph neural networks (GNN), which automatically support variable connectivity between particles. This approach was recently found promising for particle-based simulation of complex fluids [1]. We start from a time-implicit, or nonsmooth, DEM [2], where the computational bottleneck is the process of solving a mixed linear complementarity problem (MLCP) to obtain the contact forces and particle velocity update. This solve step is substituted by a GNN, trained to predict the MLCP solution. Following [1], we employ an encoder-process-decoder structure for the GNN. The particle and connectivity data is encoded in an input graph with particle mass, external force, and previous velocity as node attributes, and contact overlap, normal, and tangent vectors as edge attributes. The sought solution is represented in the output graph with the updated particle velocities as node attributes and the contact forces as edge attributes. In the intermediate processing step, the input graph is converted to a latent graph, which is then advanced with a fixed number of message passing steps involving a multilayer perceptron neural network for updating the edge and node values. The output graph, with the approximate solution to the MLCP, is finally computed by decoding the last processed latent graph. Both a supervised and unsupervised method are tested for training the network on granular simulation of particles in a rotating or static drum. AGX Dynamics [3] is used for running the simulations, and Pytorch [4] in combination with the Deep Graph Library [5] for the learning. The supervised model learns from ground truth MLCP solutions, computed using a projected Gauss-Seidel (PGS) solver, sampled from 1200 simulations involving 50-150 particles. The unsupervised model learns to minimize a loss function derived from the MLCP residual function using particle configurations extracted from the same simulations but ignoring the approximate solution from the PGS solver. The simulation samples are split into training data (80%), validation data (10%), and test data (10%). Network hyperparameter optimization is performed. The supervised GNN solver reaches an error level of 1% for the contact forces and 0.01% on the particle velocities for a static drum. For a rotating drum, the respective errors are 10% and 1%. The unsupervised GNN solver reaches 1% velocity errors, 5% normal forces errors, but it has significant problems with predicting the friction forces. The latter is presumably because of the discontinuous loss function that follows from the Coulomb friction law and therefore we explore regularization of it. Finally, we discuss the potential scalability and performance for large particle systems.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {conference}
}
The discrete element method (DEM) is a versatile but computationally intensive method for granular dynamics simulation. We investigate the possibility of accelerating DEM simulations using graph neural networks (GNN), which automatically support variable connectivity between particles. This approach was recently found promising for particle-based simulation of complex fluids [1]. We start from a time-implicit, or nonsmooth, DEM [2], where the computational bottleneck is the process of solving a mixed linear complementarity problem (MLCP) to obtain the contact forces and particle velocity update. This solve step is substituted by a GNN, trained to predict the MLCP solution. Following [1], we employ an encoder-process-decoder structure for the GNN. The particle and connectivity data is encoded in an input graph with particle mass, external force, and previous velocity as node attributes, and contact overlap, normal, and tangent vectors as edge attributes. The sought solution is represented in the output graph with the updated particle velocities as node attributes and the contact forces as edge attributes. In the intermediate processing step, the input graph is converted to a latent graph, which is then advanced with a fixed number of message passing steps involving a multilayer perceptron neural network for updating the edge and node values. The output graph, with the approximate solution to the MLCP, is finally computed by decoding the last processed latent graph. Both a supervised and unsupervised method are tested for training the network on granular simulation of particles in a rotating or static drum. AGX Dynamics [3] is used for running the simulations, and Pytorch [4] in combination with the Deep Graph Library [5] for the learning. The supervised model learns from ground truth MLCP solutions, computed using a projected Gauss-Seidel (PGS) solver, sampled from 1200 simulations involving 50-150 particles. The unsupervised model learns to minimize a loss function derived from the MLCP residual function using particle configurations extracted from the same simulations but ignoring the approximate solution from the PGS solver. The simulation samples are split into training data (80%), validation data (10%), and test data (10%). Network hyperparameter optimization is performed. The supervised GNN solver reaches an error level of 1% for the contact forces and 0.01% on the particle velocities for a static drum. For a rotating drum, the respective errors are 10% and 1%. The unsupervised GNN solver reaches 1% velocity errors, 5% normal forces errors, but it has significant problems with predicting the friction forces. The latter is presumably because of the discontinuous loss function that follows from the Coulomb friction law and therefore we explore regularization of it. Finally, we discuss the potential scalability and performance for large particle systems. |
 | Wiberg, Viktor; Servin, Martin; Nordfjell, Tomas: Discrete element modelling of large soil deformations under heavy vehicles. In: Journal of Terramechanics, vol. 93, pp. 11–21, 2021. @article{wiberg2021discrete,
title = {Discrete element modelling of large soil deformations under heavy vehicles},
author = {Viktor Wiberg and Martin Servin and Tomas Nordfjell},
url = {https://doi.org/10.1016/j.jterra.2020.10.002},
year = {2021},
date = {2021-01-01},
journal = {Journal of Terramechanics},
volume = {93},
pages = {11--21},
publisher = {Elsevier},
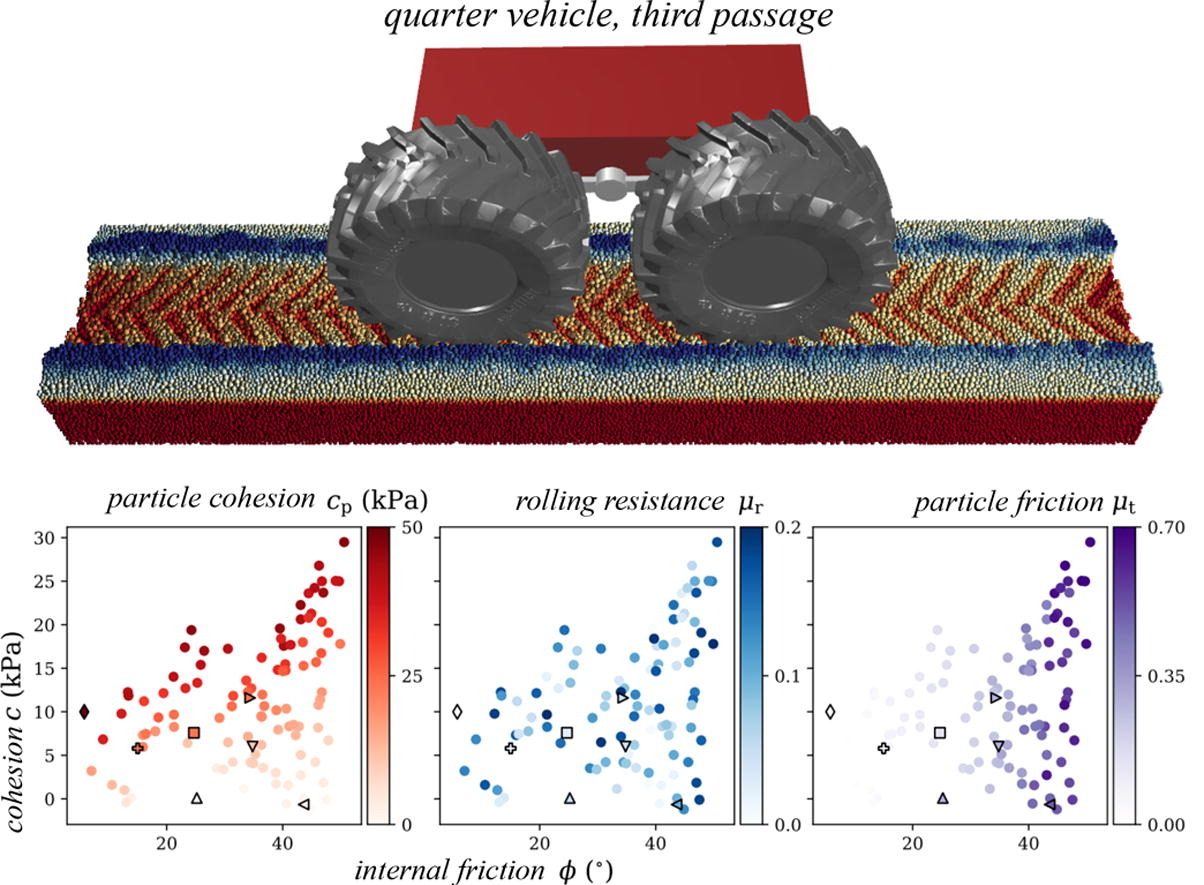
abstract = {This paper addresses the challenges of creating realistic models of soil for simulations of heavy vehicles on weak terrain. We modelled dense soils using the discrete element method with variable parameters for surface friction, normal cohesion, and rolling resistance. To find out what type of soils can be represented, we measured the internal friction and bulk cohesion of over 100 different virtual samples. To test the model, we simulated rut formation from a heavy vehicle with different loads and soil strengths. We conclude that the relevant space of dense frictional and frictional-cohesive soils can be represented and that the model is applicable for simulation of large deformations induced by heavy vehicles on weak terrain.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
This paper addresses the challenges of creating realistic models of soil for simulations of heavy vehicles on weak terrain. We modelled dense soils using the discrete element method with variable parameters for surface friction, normal cohesion, and rolling resistance. To find out what type of soils can be represented, we measured the internal friction and bulk cohesion of over 100 different virtual samples. To test the model, we simulated rut formation from a heavy vehicle with different loads and soil strengths. We conclude that the relevant space of dense frictional and frictional-cohesive soils can be represented and that the model is applicable for simulation of large deformations induced by heavy vehicles on weak terrain. |
 | Backman, Sofi; Lindmark, Daniel; Bodin, Kenneth; Servin, Martin; Mörk, Joakim; Löfgren, Håkan: Continuous control of an underground loader using deep reinforcement learning. In: Machines, vol. 9, no. 10, pp. 216, 2021. @article{backman2021continuous,
title = {Continuous control of an underground loader using deep reinforcement learning},
author = {Sofi Backman and Daniel Lindmark and Kenneth Bodin and Martin Servin and Joakim Mörk and Håkan Löfgren},
url = {https://www.mdpi.com/2075-1702/9/10/216
https://www.mdpi.com/2075-1702/9/10/216/pdf
https://www.algoryx.se/papers/drl-loader/
https://youtu.be/RzDTFZW26H0},
doi = { doi.org/10.3390/machines9100216},
year = {2021},
date = {2021-01-01},
journal = {Machines},
volume = {9},
number = {10},
pages = {216},
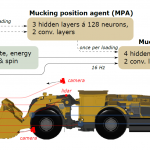
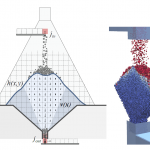
abstract = {Reinforcement learning control of an underground loader is investigated in simulated environment, using a multi-agent deep neural network approach. At the start of each loading cycle, one agent selects the dig position from a depth camera image of the pile of fragmented rock. A second agent is responsible for continuous control of the vehicle, with the goal of filling the bucket at the selected loading point, while avoiding collisions, getting stuck, or losing ground traction. It relies on motion and force sensors, as well as on camera and lidar. Using a soft actor-critic algorithm the agents learn policies for efficient bucket filling over many subsequent loading cycles, with clear ability to adapt to the changing environment. The best results, on average 75% of the max capacity, are obtained when including a penalty for energy usage in the reward.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
Reinforcement learning control of an underground loader is investigated in simulated environment, using a multi-agent deep neural network approach. At the start of each loading cycle, one agent selects the dig position from a depth camera image of the pile of fragmented rock. A second agent is responsible for continuous control of the vehicle, with the goal of filling the bucket at the selected loading point, while avoiding collisions, getting stuck, or losing ground traction. It relies on motion and force sensors, as well as on camera and lidar. Using a soft actor-critic algorithm the agents learn policies for efficient bucket filling over many subsequent loading cycles, with clear ability to adapt to the changing environment. The best results, on average 75% of the max capacity, are obtained when including a penalty for energy usage in the reward. |
 | Andersson, Jennifer; Bodin, Kenneth; Lindmark, Daniel; Servin, Martin; Wallin, Erik: Reinforcement Learning Control of a Forestry Crane Manipulator. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021), Sep. 27-Oct. 1st, 2021, Prague, Czech Republic (2021). arXiv:2103.02315, 2021. @article{andersson2021reinforcement,
title = {Reinforcement Learning Control of a Forestry Crane Manipulator},
author = {Jennifer Andersson and Kenneth Bodin and Daniel Lindmark and Martin Servin and Erik Wallin},
url = {https://arxiv.org/abs/2103.02315
https://arxiv.org/pdf/2103.02315
https://www.algoryx.se/papers/rlc-crane/
https://youtu.be/7xwMlS5uqxs},
year = {2021},
date = {2021-01-01},
journal = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021), Sep. 27-Oct. 1st, 2021, Prague, Czech Republic (2021). arXiv:2103.02315},
abstract = {Forestry machines are heavy vehicles performing complex manipulation tasks in unstructured production forest environments. Together with the complex dynamics of the on-board hydraulically actuated cranes, the rough forest terrains have posed a particular challenge in forestry automation. In this study, the feasibility of applying reinforcement learning control to forestry crane manipulators is investigated in a simulated environment. Our results show that it is possible to learn successful actuator-space control policies for energy efficient log grasping by invoking a simple curriculum in a deep reinforcement learning setup. Given the pose of the selected logs, our best control policy reaches a grasping success rate of 97%. Including an energy-optimization goal in the reward function, the energy consumption is significantly reduced compared to control policies learned without incentive for energy optimization, while the increase in cycle time is marginal. The energy-optimization effects can be observed in the overall smoother motion and acceleration profiles during crane manipulation.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
Forestry machines are heavy vehicles performing complex manipulation tasks in unstructured production forest environments. Together with the complex dynamics of the on-board hydraulically actuated cranes, the rough forest terrains have posed a particular challenge in forestry automation. In this study, the feasibility of applying reinforcement learning control to forestry crane manipulators is investigated in a simulated environment. Our results show that it is possible to learn successful actuator-space control policies for energy efficient log grasping by invoking a simple curriculum in a deep reinforcement learning setup. Given the pose of the selected logs, our best control policy reaches a grasping success rate of 97%. Including an energy-optimization goal in the reward function, the energy consumption is significantly reduced compared to control policies learned without incentive for energy optimization, while the increase in cycle time is marginal. The energy-optimization effects can be observed in the overall smoother motion and acceleration profiles during crane manipulation. |
 | Wallin, Erik; Servin, Martin: Data-driven model order reduction for granular media. In: Computational Particle Mechanics, pp. 1–14, 2021. @article{wallin2021data,
title = {Data-driven model order reduction for granular media},
author = {Erik Wallin and Martin Servin},
url = {http://umit.cs.umu.se/ddgranular/
https://doi.org/10.1007/s40571-020-00387-6
https://arxiv.org/pdf/2004.03349
https://arxiv.org/abs/2004.03349
https://youtu.be/YjwP9baTm-c?list=TLGGYuzbbp4IBtcxOTA0MjAyMQ},
year = {2021},
date = {2021-01-01},
journal = {Computational Particle Mechanics},
pages = {1--14},
publisher = {Springer},
abstract = {We investigate the use of reduced-order modelling to run discrete element simulations at higher speeds. Taking a data-driven approach, we run many offline simulations in advance and train a model to predict the velocity field from the mass distribution and system control signals. Rapid model inference of particle velocities replaces the intense process of computing contact forces and velocity updates. In coupled DEM and multibody system simulation the predictor model can be trained to output the interfacial reaction forces as well. An adaptive model order reduction technique is investigated, decomposing the media in domains of solid, liquid, and gaseous state. The model reduction is applied to solid and liquid domains where the particle motion is strongly correlated with the mean flow, while resolved DEM is used for gaseous domains. Using a ridge regression predictor, the performance is tested on simulations of a pile discharge and bulldozing. The measured accuracy is about 90% and 65%, respectively, and the speed-up range between 10 and 60},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
We investigate the use of reduced-order modelling to run discrete element simulations at higher speeds. Taking a data-driven approach, we run many offline simulations in advance and train a model to predict the velocity field from the mass distribution and system control signals. Rapid model inference of particle velocities replaces the intense process of computing contact forces and velocity updates. In coupled DEM and multibody system simulation the predictor model can be trained to output the interfacial reaction forces as well. An adaptive model order reduction technique is investigated, decomposing the media in domains of solid, liquid, and gaseous state. The model reduction is applied to solid and liquid domains where the particle motion is strongly correlated with the mean flow, while resolved DEM is used for gaseous domains. Using a ridge regression predictor, the performance is tested on simulations of a pile discharge and bulldozing. The measured accuracy is about 90% and 65%, respectively, and the speed-up range between 10 and 60 |
 | Servin, Martin; Vesterlund, Folke; Wallin, Erik: Digital twins with embedded particle simulation. In: 14th World Congress in Computational Mechanics (WCCM) ECCOMAS Congress, Virtual, January 11-15, 2021, 2021. @inproceedings{servin2021digital,
title = {Digital twins with embedded particle simulation},
author = {Martin Servin and Folke Vesterlund and Erik Wallin},
url = {http://umu.diva-portal.org/smash/record.jsf?language=sv&pid=diva2%3A1499113&dswid=-3497
http://umu.diva-portal.org/smash/get/diva2:1499113/FULLTEXT01.pdf},
year = {2021},
date = {2021-01-01},
booktitle = {14th World Congress in Computational Mechanics (WCCM) ECCOMAS Congress, Virtual, January 11-15, 2021},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2020
|
 | Andersson, Jennifer: Simulation-Driven Machine Learning Control of a Forestry Crane Manipulator. 2020. @mastersthesis{andersson2020simulation,
title = {Simulation-Driven Machine Learning Control of a Forestry Crane Manipulator},
author = {Jennifer Andersson},
url = {http://uu.diva-portal.org/smash/record.jsf?pid=diva2%3A1507839&dswid=-3497
http://uu.diva-portal.org/smash/get/diva2:1507839/FULLTEXT01.pdf},
year = {2020},
date = {2020-01-01},
abstract = {A forwarder is a forestry vehicle carrying felled logs from the forest harvesting site, thereby constituting an essential part of the modern forest harvesting cycle. Successful automation efforts can increase productivity and improve operator working conditions, but despite increasing levels of automation in industry today, forwarders have remained manually operated. In our work, the grasping motion of a hydraulic-actuated forestry crane manipulator is automated in a simulated environment using state-of-the-art deep reinforcement learning methods. Two approaches for single-log grasping are investigated; amulti-agent approach and a single-agent approach based on curriculum learning. We show that both approaches can yield a high grasping success rate. Given the position and orientation of the target log, the best control policy is able to successfully grasp 97.4% of target logs.Including incentive for energy optimization, we are able to reduce theaverage energy consumption by 58.4% compared to the non-energy optimized model, while maintaining 82.9% of the success rate. The energy optimized control policy results in an overall smoother crane motion andacceleration profile during grasping. The results are promising and provide a natural starting point for end-to-end automation of forestry crane manipulators in the real world.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
A forwarder is a forestry vehicle carrying felled logs from the forest harvesting site, thereby constituting an essential part of the modern forest harvesting cycle. Successful automation efforts can increase productivity and improve operator working conditions, but despite increasing levels of automation in industry today, forwarders have remained manually operated. In our work, the grasping motion of a hydraulic-actuated forestry crane manipulator is automated in a simulated environment using state-of-the-art deep reinforcement learning methods. Two approaches for single-log grasping are investigated; amulti-agent approach and a single-agent approach based on curriculum learning. We show that both approaches can yield a high grasping success rate. Given the position and orientation of the target log, the best control policy is able to successfully grasp 97.4% of target logs.Including incentive for energy optimization, we are able to reduce theaverage energy consumption by 58.4% compared to the non-energy optimized model, while maintaining 82.9% of the success rate. The energy optimized control policy results in an overall smoother crane motion andacceleration profile during grasping. The results are promising and provide a natural starting point for end-to-end automation of forestry crane manipulators in the real world. |
 | Asplund, Philip: Real-Time Spherical Discretization. Department of Computing Science, Umeå University, Sweden, 2020. @mastersthesis{Asplund2020,
title = {Real-Time Spherical Discretization},
author = {Philip Asplund},
url = {https://www.algoryx.se/mainpage/wp-content/uploads/2021/04/REAL-TIME-SPHERICAL-DISCRETIZATION-Surface-rendering-and-upscaling-Philip-Asplund-Master_Thesis.pdf},
year = {2020},
date = {2020-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {This thesis explores a method for upscaling and increasing the visual fidelity of coarse soil simulation. This is done through the use of a High Resolution (HR)- based method that guides fine-scale particles which are then rendered using either surface rendering or rendering with particle meshes. This thesis also explores the idea of omitting direct calculation of the internal and external forces, and instead only use the velocity voxel grid generated from the coarse simulation. This is done to determine if the method can still reproduce natural soil movements of the fine-scale particles when simulating and rendering under realtime constraints.
The result shows that this method increases the visual fidelity of the rendering without a significant impact on the overall simulation run-time performance, while the fine-scale particles still produce movements that are perceived as natural. It also shows that the use of surface rendering does not need as high fine-scale particle resolution for the same perceived visual soil fidelity as when rendering with particle mesh.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
This thesis explores a method for upscaling and increasing the visual fidelity of coarse soil simulation. This is done through the use of a High Resolution (HR)- based method that guides fine-scale particles which are then rendered using either surface rendering or rendering with particle meshes. This thesis also explores the idea of omitting direct calculation of the internal and external forces, and instead only use the velocity voxel grid generated from the coarse simulation. This is done to determine if the method can still reproduce natural soil movements of the fine-scale particles when simulating and rendering under realtime constraints.
The result shows that this method increases the visual fidelity of the rendering without a significant impact on the overall simulation run-time performance, while the fine-scale particles still produce movements that are perceived as natural. It also shows that the use of surface rendering does not need as high fine-scale particle resolution for the same perceived visual soil fidelity as when rendering with particle mesh. |
 | Servin, Martin; Berglund, Tomas; Nystedt, Samuel: A multiscale model of terrain dynamics for real-time earthmoving simulation. In: arXiv preprint arXiv:2011.00459, 2020. @article{servin2020multiscale,
title = {A multiscale model of terrain dynamics for real-time earthmoving simulation},
author = {Martin Servin and Tomas Berglund and Samuel Nystedt},
url = {https://www.algoryx.se/papers/terrain/
https://arxiv.org/abs/2011.00459
https://arxiv.org/pdf/2011.00459.pdf
},
year = {2020},
date = {2020-01-01},
journal = {arXiv preprint arXiv:2011.00459},
abstract = {A multiscale model for real-time simulation of terrain dynamics is explored. To represent the dynamics on different scales the model combines the description of soil as a continuous solid, as distinct particles and as rigid multibodies. The models are dynamically coupled to each other and to the earthmoving equipment. Agitated soil is represented by a hybrid of contacting particles and continuum solid, with the moving equipment and resting soil as geometric boundaries. Each zone of active soil is aggregated into distinct bodies, with the proper mass, momentum and frictional-cohesive properties, which constrain the equipment's multibody dynamics. The particle model parameters are pre-calibrated to the bulk mechanical parameters for a wide range of different soils. The result is a computationally efficient model for earthmoving operations that resolve the motion of the soil, using a fast iterative solver, and provide realistic forces and dynamic for the equipment, using a direct solver for high numerical precision. Numerical simulations of excavation and bulldozing operations are performed to validate the model and measure the computational performance. Reference data is produced using coupled discrete element and multibody dynamics simulations at relatively high resolution. The digging resistance and soil displacements with the real-time multiscale model agree with the reference model up to 10-25%, and run more than three orders of magnitude faster.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
A multiscale model for real-time simulation of terrain dynamics is explored. To represent the dynamics on different scales the model combines the description of soil as a continuous solid, as distinct particles and as rigid multibodies. The models are dynamically coupled to each other and to the earthmoving equipment. Agitated soil is represented by a hybrid of contacting particles and continuum solid, with the moving equipment and resting soil as geometric boundaries. Each zone of active soil is aggregated into distinct bodies, with the proper mass, momentum and frictional-cohesive properties, which constrain the equipment's multibody dynamics. The particle model parameters are pre-calibrated to the bulk mechanical parameters for a wide range of different soils. The result is a computationally efficient model for earthmoving operations that resolve the motion of the soil, using a fast iterative solver, and provide realistic forces and dynamic for the equipment, using a direct solver for high numerical precision. Numerical simulations of excavation and bulldozing operations are performed to validate the model and measure the computational performance. Reference data is produced using coupled discrete element and multibody dynamics simulations at relatively high resolution. The digging resistance and soil displacements with the real-time multiscale model agree with the reference model up to 10-25%, and run more than three orders of magnitude faster. |
 | Vikdahl, Martin: Streaming Data Models for Distributed Physics Simulation Workflows. Department of Computing Science, Umeå University, Sweden, 2020. @mastersthesis{Vikdahl2020,
title = {Streaming Data Models for Distributed Physics Simulation Workflows},
author = {Martin Vikdahl},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-177599
https://www.algoryx.se/mainpage/wp-content/uploads/2021/04/Thesis-Martin.Vikdahl-Streaming.data_.models.for-distributed.physics.simulation.workflows.pdf},
year = {2020},
date = {2020-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {This project explores the possibility of lowering the barrier of entry for integrating a physics engine into distributed organization-specific pipelines by providing an interface for communicating over the network between domain-specific tools. The approach uses an event-driven interface, both for transferring simulation models incrementally as event streams and for suggesting modifications of the models.
The proposed architecture uses a technique for storing and managing different versions of the simulation models that roughly aligns with the concept of event sourcing and allowed for communicating updates to models by only sending information about what had changed since the older version. The architecture also has a simple dependency management system between models that takes versioning into account by causally ordering dependencies. The solution allows for multiple simultaneous client users which could support connecting collaborative editing and visualization tools.
By implementing a prototype of the architecture it was concluded that the format could encode models into a compact stream of small, autonomous event messages, that could be used to replicate the original structure on the receiving end, but it was difficult to make a good quantitative evaluation without access to a large collection of representative example models, because the size distributions depended on the usage.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
This project explores the possibility of lowering the barrier of entry for integrating a physics engine into distributed organization-specific pipelines by providing an interface for communicating over the network between domain-specific tools. The approach uses an event-driven interface, both for transferring simulation models incrementally as event streams and for suggesting modifications of the models.
The proposed architecture uses a technique for storing and managing different versions of the simulation models that roughly aligns with the concept of event sourcing and allowed for communicating updates to models by only sending information about what had changed since the older version. The architecture also has a simple dependency management system between models that takes versioning into account by causally ordering dependencies. The solution allows for multiple simultaneous client users which could support connecting collaborative editing and visualization tools.
By implementing a prototype of the architecture it was concluded that the format could encode models into a compact stream of small, autonomous event messages, that could be used to replicate the original structure on the receiving end, but it was difficult to make a good quantitative evaluation without access to a large collection of representative example models, because the size distributions depended on the usage. |
2019
|
 | Servin, Martin; Wallin, Erik: Reduced order modeling for realtime simulation with granular materials. In: VI International Conference on Particle-Based Methods-Fundamentals and Applications-PARTICLES. Barcelona, Spain, October 28-30, 2019, 2019. @inproceedings{servin2019reduced,
title = {Reduced order modeling for realtime simulation with granular materials},
author = {Martin Servin and Erik Wallin},
url = {http://umu.diva-portal.org/smash/record.jsf?language=sv&pid=diva2%3A1319374&dswid=-61
http://umu.diva-portal.org/smash/get/diva2:1319374/SUMMARY01.pdf
},
year = {2019},
date = {2019-01-01},
booktitle = {VI International Conference on Particle-Based Methods-Fundamentals and Applications-PARTICLES. Barcelona, Spain, October 28-30, 2019},
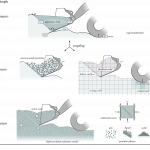
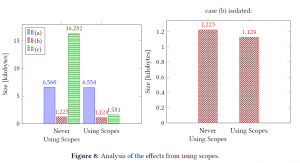
abstract = {The discrete element method (DEM) is a versatile but computationally intense method for simulation of granular materials. It is therefore rarely used in applications that require realtime performance, e.g, interactive simulaions with a human operator or hardware in the loop.
We investigate the use of reduced order modeling for achieving realtime performance in coupled discrete element and rigid multibody simulations. First, a large data set is produced from a series of simulations that cover a selected state-space. The particle data is coarse-grained into discrete field variables, representing mass density, velocity, strain and stress. A reduced order representation of the state-space is identified. Different methods for predicting the fields are explored, given certain observations and assumptions about the state of the simulation e.g., motion of boundaries, rigid bodies or control signals. The particle positions and velocities can then be advanced in time using the predicted fields plus a model for particle diffusion [4] and a local incompressibility constraint [1]. The resulting method can be seen as an extension to the one in [5], by extending the reduced space from rigid body motion of particle aggregates to a low-dimensional space of flow fields [2, 3].
The precision and computational performance of the reduced order simulation method is analyzed on simple test systems, including silo flow and a blade cutting a granular bed. Finally, coupled simulation of an articulated rigid multibody system and a reduced order granular system is demonstrated.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
The discrete element method (DEM) is a versatile but computationally intense method for simulation of granular materials. It is therefore rarely used in applications that require realtime performance, e.g, interactive simulaions with a human operator or hardware in the loop.
We investigate the use of reduced order modeling for achieving realtime performance in coupled discrete element and rigid multibody simulations. First, a large data set is produced from a series of simulations that cover a selected state-space. The particle data is coarse-grained into discrete field variables, representing mass density, velocity, strain and stress. A reduced order representation of the state-space is identified. Different methods for predicting the fields are explored, given certain observations and assumptions about the state of the simulation e.g., motion of boundaries, rigid bodies or control signals. The particle positions and velocities can then be advanced in time using the predicted fields plus a model for particle diffusion [4] and a local incompressibility constraint [1]. The resulting method can be seen as an extension to the one in [5], by extending the reduced space from rigid body motion of particle aggregates to a low-dimensional space of flow fields [2, 3].
The precision and computational performance of the reduced order simulation method is analyzed on simple test systems, including silo flow and a blade cutting a granular bed. Finally, coupled simulation of an articulated rigid multibody system and a reduced order granular system is demonstrated. |
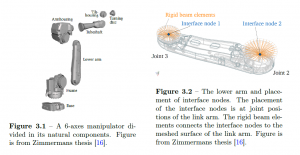 | Syrén, Ludvig: A method for introducing flexibility in rigid multibodies from reduced order elastic models. Department of Physics, Umeå University, 2019. @mastersthesis{Syren2019,
title = {A method for introducing flexibility in rigid multibodies from reduced order elastic models},
author = {Ludvig Syrén},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-160417
https://umu.diva-portal.org/smash/get/diva2:1326569/FULLTEXT01.pdf
},
year = {2019},
date = {2019-01-01},
school = {Department of Physics, Umeå University},
abstract = {In multibody dynamics simulation of robots and vehicles it is common to model the systems as being composed of mainly rigid bodies with articulation joints. With the trend to more lightweight robots, however, the structural flexibility of the robots link’s needs to be considered for realistic dynamic simulations. The link’s geometries are complex and finite element models (FEM) are required to compute the deformations. However, FEM includes too many degrees of freedom for time-efficient dynamics simulation. A popular method is to generate reduced order models from the FE models, but with much fewer degrees of freedom, for fast and precise simulations. In this thesis a method for introducing reduced order models in rigid multibody systems was developed. The method is to divide a rigid body into two rigid bodies. Their relative movement is described by a six degree of freedom restoration force, determined with a reduced order model from Guyan reduction (static condensation). The method was validated for quasistatic deformation of a homogenous beam, a robot link arm with a more complex geometry and in multibody dynamics simulations. Finally the method was tested in simulation of a complete ABB robot with joint actuators, and any significant differences in the motion of the robot tool centre point due to replacing a rigid link arm by a flexible one was demonstrated.The method show good results for computing deformations of the homogenous beam, of the link arm and in the multibody simulation. The differences observed in simulation of a complete robot was expected and demonstrated the method to be applicable in robotic simulations.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
In multibody dynamics simulation of robots and vehicles it is common to model the systems as being composed of mainly rigid bodies with articulation joints. With the trend to more lightweight robots, however, the structural flexibility of the robots link’s needs to be considered for realistic dynamic simulations. The link’s geometries are complex and finite element models (FEM) are required to compute the deformations. However, FEM includes too many degrees of freedom for time-efficient dynamics simulation. A popular method is to generate reduced order models from the FE models, but with much fewer degrees of freedom, for fast and precise simulations. In this thesis a method for introducing reduced order models in rigid multibody systems was developed. The method is to divide a rigid body into two rigid bodies. Their relative movement is described by a six degree of freedom restoration force, determined with a reduced order model from Guyan reduction (static condensation). The method was validated for quasistatic deformation of a homogenous beam, a robot link arm with a more complex geometry and in multibody dynamics simulations. Finally the method was tested in simulation of a complete ABB robot with joint actuators, and any significant differences in the motion of the robot tool centre point due to replacing a rigid link arm by a flexible one was demonstrated.The method show good results for computing deformations of the homogenous beam, of the link arm and in the multibody simulation. The differences observed in simulation of a complete robot was expected and demonstrated the method to be applicable in robotic simulations. |
2018
|
 | Lundkvist, Anna: Fatigue analysis - local geometry optimization. 2018. @mastersthesis{Lundkvist2018,
title = {Fatigue analysis - local geometry optimization},
author = {Anna Lundkvist},
url = {http://www.diva-portal.org/smash/get/diva2:1251131/FULLTEXT01.pdf
http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-152084},
year = {2018},
date = {2018-07-09},
abstract = {The cause of fatigue failure is repeated loads, that cause cracks to appear and grow even if the loads are far below the static load that would make a structure fail. High-cycle fatigue, which this project will focus on, is characterized by linear elastic stress and only fails after a large amount of loading cycles. While fatigue is the most common cause of failure in structures, it is not feasible to calculate fatigue damage analytically. The aim of this project was to develop, implement and test a workflow that unifies the wide range of physical scales and transient features that are relevant to fatigue analysis of complex dynamic machinery. The workflow should take both system-level and local aspects into account. The goal was to address both the global and local while still keeping practical feasibility and simulation performance in mind. The resulting unified fatigue analysis method was then used on several test cases and illustrated from a local geometry optimization perspective.
The workflow contains the following steps: First the model is to be simulated in order to get the load history. Then the finite element method (FEM) is used to make a submodel of the component that is to be analyzed. The submodel is subjected to forces and moments, and then the stress is extracted from the areas of interest in the model. Thus, a linear relation for the stress can be calculated. The stress history is calculated by putting the load history into the stress relation. Using established fatigue analysis methods like rainflow counting and the Palmgren-Miner rule the fatigue life is then calculated.
This project only had its focus on the FEM submodel part of the fatigue workflow. The geometry of the submodel should then be able to be optimized for the longest fatigue life.
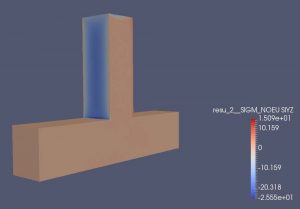
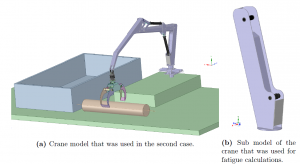
The workflow was tested on several test cases. The first one was a simple upsidedown T-shaped component that was made by welding the parts together. The same component but with no weld, as if it had been moulded, was the next case. The final case was a component from the base of a crane. Two things were analyzed on this case. The first was the fatigue life around a hole in which a shaft was welded. The other was optimizing to find the best position for a hook to be welded onto the surface on the component.
},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
The cause of fatigue failure is repeated loads, that cause cracks to appear and grow even if the loads are far below the static load that would make a structure fail. High-cycle fatigue, which this project will focus on, is characterized by linear elastic stress and only fails after a large amount of loading cycles. While fatigue is the most common cause of failure in structures, it is not feasible to calculate fatigue damage analytically. The aim of this project was to develop, implement and test a workflow that unifies the wide range of physical scales and transient features that are relevant to fatigue analysis of complex dynamic machinery. The workflow should take both system-level and local aspects into account. The goal was to address both the global and local while still keeping practical feasibility and simulation performance in mind. The resulting unified fatigue analysis method was then used on several test cases and illustrated from a local geometry optimization perspective.
The workflow contains the following steps: First the model is to be simulated in order to get the load history. Then the finite element method (FEM) is used to make a submodel of the component that is to be analyzed. The submodel is subjected to forces and moments, and then the stress is extracted from the areas of interest in the model. Thus, a linear relation for the stress can be calculated. The stress history is calculated by putting the load history into the stress relation. Using established fatigue analysis methods like rainflow counting and the Palmgren-Miner rule the fatigue life is then calculated.
This project only had its focus on the FEM submodel part of the fatigue workflow. The geometry of the submodel should then be able to be optimized for the longest fatigue life.
The workflow was tested on several test cases. The first one was a simple upsidedown T-shaped component that was made by welding the parts together. The same component but with no weld, as if it had been moulded, was the next case. The final case was a component from the base of a crane. Two things were analyzed on this case. The first was the fatigue life around a hole in which a shaft was welded. The other was optimizing to find the best position for a hook to be welded onto the surface on the component.
|
 | Lindmark, Daniel M; Servin, Martin: Computational exploration of robotic rock loading. In: Robotics and Autonomous Systems, vol. 106, pp. 117–129, 2018. @article{lindmark2018computational,
title = {Computational exploration of robotic rock loading},
author = {Daniel M Lindmark and Martin Servin},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/computational_exploration.pdf
http://umit.cs.umu.se/loading/
https://vimeo.com/230986207},
doi = {10.1016/j.robot.2018.04.010},
year = {2018},
date = {2018-01-01},
journal = {Robotics and Autonomous Systems},
volume = {106},
pages = {117--129},
publisher = {North-Holland},
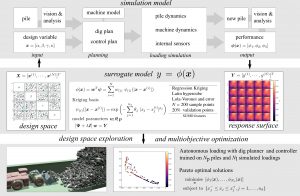
abstract = {A method for simulation-based development of robotic rock loading systems is described and tested. The idea is to first formulate a generic loading strategy as a function of the shape of the rock pile, the kinematics of the machine and a set of motion design variables that will be used by the autonomous control system. The relation between the loading strategy and resulting performance is then explored systematically using contacting multibody dynamics simulation, multiobjective optimisation and surrogate modelling. With the surrogate model it is possible to find Pareto optimal loading strategies for dig plans that are adapted to the current shape of the pile. The method is tested on a load–haul–dump machine loading from a large muck pile in an underground mine, with the loading performance measured by productivity, machine wear and rock debris spill that cause interruptions.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
A method for simulation-based development of robotic rock loading systems is described and tested. The idea is to first formulate a generic loading strategy as a function of the shape of the rock pile, the kinematics of the machine and a set of motion design variables that will be used by the autonomous control system. The relation between the loading strategy and resulting performance is then explored systematically using contacting multibody dynamics simulation, multiobjective optimisation and surrogate modelling. With the surrogate model it is possible to find Pareto optimal loading strategies for dig plans that are adapted to the current shape of the pile. The method is tested on a load–haul–dump machine loading from a large muck pile in an underground mine, with the loading performance measured by productivity, machine wear and rock debris spill that cause interruptions. |
 | Markgren, Hanna: Fatigue analysis - system parameters optimization. Department of Physics, Umeå University, 2018. @mastersthesis{Markgren2018,
title = {Fatigue analysis - system parameters optimization},
author = {Hanna Markgren},
url = {https://umu.diva-portal.org/smash/get/diva2:1247557/FULLTEXT01.pdf
http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-151755},
year = {2018},
date = {2018-01-01},
school = {Department of Physics, Umeå University},
abstract = {For a mechanical system exposed to repeated cyclic loads fatigue is one of the most common reasons for the system to fail. However fatigue failure calculations are not that well developed. Often when fatigue calculations are made they are done with standard loads and simplified cases.
The fatigue life is the time from start of use until the system fails due to fatigue and there does exist some building blocks to calculate the fatigue life. The aim for this project was to put these building blocks together in a workflow that ca be used for calculations of the fatigue life.
The workflow was built so that it should be easy to follow for any type of me- chanical system. The start of the workflow is the load history of the system. This is then converted into a stress history that is used for the calculations of the fatigue life. Finally the workflow was tested with two test cases to see if it was possible to use.
In Algoryx Momentum the model for each case was set up and then the load history was extracted for each time step during the simulation. To convert the load history to stress history FEM calculations was needed, this was however not a part of this project so the constants to convert loads to stress was given. Then with the stress history in place it was possible to calculate the fatigue life.
The results from both test cases were that it was possible to follow every step of the workflow and by this use the workflow to calculate the fatigue life. The second test also showed that with an optimization the system was improved and this resulted in a longer lifetime.
To conclude the workflow seems to work as expected and is quite easy to follow. The result given by using the workflow shows the fatigue life, which was the target for the project. However, to be able to evaluate the workflow fully and understand how well the resluts can be trusted a comparison with empiric data would be needed. Still the results from the tests are that the workflow seem to give reasonable results when calculating fatigue life.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
For a mechanical system exposed to repeated cyclic loads fatigue is one of the most common reasons for the system to fail. However fatigue failure calculations are not that well developed. Often when fatigue calculations are made they are done with standard loads and simplified cases.
The fatigue life is the time from start of use until the system fails due to fatigue and there does exist some building blocks to calculate the fatigue life. The aim for this project was to put these building blocks together in a workflow that ca be used for calculations of the fatigue life.
The workflow was built so that it should be easy to follow for any type of me- chanical system. The start of the workflow is the load history of the system. This is then converted into a stress history that is used for the calculations of the fatigue life. Finally the workflow was tested with two test cases to see if it was possible to use.
In Algoryx Momentum the model for each case was set up and then the load history was extracted for each time step during the simulation. To convert the load history to stress history FEM calculations was needed, this was however not a part of this project so the constants to convert loads to stress was given. Then with the stress history in place it was possible to calculate the fatigue life.
The results from both test cases were that it was possible to follow every step of the workflow and by this use the workflow to calculate the fatigue life. The second test also showed that with an optimization the system was improved and this resulted in a longer lifetime.
To conclude the workflow seems to work as expected and is quite easy to follow. The result given by using the workflow shows the fatigue life, which was the target for the project. However, to be able to evaluate the workflow fully and understand how well the resluts can be trusted a comparison with empiric data would be needed. Still the results from the tests are that the workflow seem to give reasonable results when calculating fatigue life. |
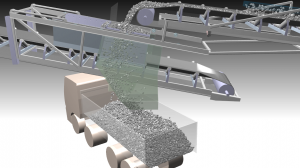 | Berglund, Tomas; Mickelsson, Kjell-Ove; Servin, Martin: Virtual commissioning of a mobile ore chute. The 9nth International Conference on Conveying and Handling of Particulate Solids (CHoPS), London, UK (2018), vol. 10, 2018. @conference{berglund2018virtual,
title = {Virtual commissioning of a mobile ore chute},
author = {Tomas Berglund and Kjell-Ove Mickelsson and Martin Servin},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/vcmoc_chops.pdf
http://umit.cs.umu.se/chute/
https://www.linkedin.com/pulse/virtual-commissioning-mobile-ore-chute-martin-servin/
},
year = {2018},
date = {2018-01-01},
booktitle = {The 9nth International Conference on Conveying and Handling of Particulate Solids (CHoPS), London, UK (2018)},
journal = {simulation},
volume = {10},
pages = {14th},
abstract = {This paper describes the virtual commissioning of a mobile ore chute for sequential loading of trucks from a conveyor system with a continuous material flow. The design and control were tested in simulation environment and improved prior to its installation in an underground mine in full production. The altered design met the performance goal and the amount of rock spill and wear on surrounding equipment could be reduced significantly. The simulations were based on a novel combination of discrete element and multibody simulation using a nonsmooth dynamics formulation, integrated in a 3D modeling software. This enable both fast simulation, based on original CAD drawings, and high flexibility in modifying the design and control.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {conference}
}
This paper describes the virtual commissioning of a mobile ore chute for sequential loading of trucks from a conveyor system with a continuous material flow. The design and control were tested in simulation environment and improved prior to its installation in an underground mine in full production. The altered design met the performance goal and the amount of rock spill and wear on surrounding equipment could be reduced significantly. The simulations were based on a novel combination of discrete element and multibody simulation using a nonsmooth dynamics formulation, integrated in a 3D modeling software. This enable both fast simulation, based on original CAD drawings, and high flexibility in modifying the design and control. |
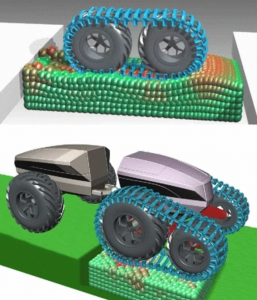 | Nordberg, John; Servin, Martin: Particle-based solid for nonsmooth multidomain dynamics. In: Computational Particle Mechanics, vol. 5, no. 2, pp. 125–139, 2018. @article{nordberg2018particle,
title = {Particle-based solid for nonsmooth multidomain dynamics},
author = {John Nordberg and Martin Servin},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/elastoplastic.pdf
http://umit.cs.umu.se/elastoplastic/
https://vimeo.com/140474641},
doi = {10.1007/s40571-017-0158-3},
year = {2018},
date = {2018-01-01},
journal = {Computational Particle Mechanics},
volume = {5},
number = {2},
pages = {125--139},
publisher = {Springer International Publishing},
abstract = {A method for simulation of elastoplastic solids in multibody systems with nonsmooth and multidomain dynamics is developed. The solid is discretised into pseudo-particles using the meshfree moving least squares method for computing the strain tensor. The particle’s strain and stress tensor variables are mapped to a compliant deformation constraint. The discretised solid model thus fit a unified framework for nonsmooth multidomain dynamics simulations including rigid multibodies with complex kinematic constraints such as articulation joints, unilateral contacts with dry friction, drivelines, and hydraulics. The nonsmooth formulation allows for impact impulses to propagate instantly between the rigid multibody and the solid. Plasticity is introduced through an associative perfectly plastic modified Drucker–Prager model. The elastic and plastic dynamics are verified for simple test systems, and the capability of simulating tracked terrain vehicles driving on a deformable terrain is demonstrated.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
A method for simulation of elastoplastic solids in multibody systems with nonsmooth and multidomain dynamics is developed. The solid is discretised into pseudo-particles using the meshfree moving least squares method for computing the strain tensor. The particle’s strain and stress tensor variables are mapped to a compliant deformation constraint. The discretised solid model thus fit a unified framework for nonsmooth multidomain dynamics simulations including rigid multibodies with complex kinematic constraints such as articulation joints, unilateral contacts with dry friction, drivelines, and hydraulics. The nonsmooth formulation allows for impact impulses to propagate instantly between the rigid multibody and the solid. Plasticity is introduced through an associative perfectly plastic modified Drucker–Prager model. The elastic and plastic dynamics are verified for simple test systems, and the capability of simulating tracked terrain vehicles driving on a deformable terrain is demonstrated. |
 | Servin, Martin; Brandl, Michael: Physics-based virtual environments for autonomous earthmoving and mining machinery. In: Commercial Vehicle Technology 2018, pp. 493–504, Springer, 2018, ISBN: 978-3-658-21300-8. @incollection{servin2018physics,
title = {Physics-based virtual environments for autonomous earthmoving and mining machinery},
author = {Martin Servin and Michael Brandl},
doi = {10.1007/978-3-658-21300-8_38},
isbn = {978-3-658-21300-8},
year = {2018},
date = {2018-01-01},
booktitle = {Commercial Vehicle Technology 2018},
pages = {493--504},
publisher = {Springer},
abstract = {The scientific foundation for constructing virtual environments (VE) that support the development of earthmoving and mining machinery with autonomous capabilities is summarized. It is explained how the physics simulation engine AGX Dynamics supports this. Finally, a method for computational design exploration of an autonomous load-haul-dump machine in a physics-based VE is described.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {incollection}
}
The scientific foundation for constructing virtual environments (VE) that support the development of earthmoving and mining machinery with autonomous capabilities is summarized. It is explained how the physics simulation engine AGX Dynamics supports this. Finally, a method for computational design exploration of an autonomous load-haul-dump machine in a physics-based VE is described. |
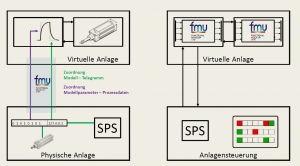 | Auris, Felix; Zipper, Holger; Brandl, Michael; Süss, Sebastian; Diedrich, Christian: Durchgängige Nutzung von Anlagenmodellen: Über den gesamten Lebenszyklus von Produktionsanlagen. In: atp magazin, vol. 60, no. 06-07, pp. 90–91, 2018. @article{auris2018durchgangige,
title = {Durchgängige Nutzung von Anlagenmodellen: Über den gesamten Lebenszyklus von Produktionsanlagen},
author = {Felix Auris and Holger Zipper and Michael Brandl and Sebastian Süss and Christian Diedrich},
doi = {10.17560/atp.v60i06-07.2350},
year = {2018},
date = {2018-01-01},
journal = {atp magazin},
volume = {60},
number = {06-07},
pages = {90--91},
abstract = {Der Beitrag konzentriert sich auf neue Konzepte zur durchgängigen, ganzheitlichen, standardisierten und effizienten Simulation über den Anlagenlebenszyklus automatisierter Montageanlagen im Automobilbau. Es wird gezeigt, wie durch die Nutzung standardisierter Datenformate ein sogenanntes mechatronisches Anlagenmodell, oft auch als digitaler Zwilling bezeichnet, implizit aus den Konstruktionsdaten generiert werden kann und in allen folgenden Phasen des Anlagenlebenszyklus weiter-
verwendet wird.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
Der Beitrag konzentriert sich auf neue Konzepte zur durchgängigen, ganzheitlichen, standardisierten und effizienten Simulation über den Anlagenlebenszyklus automatisierter Montageanlagen im Automobilbau. Es wird gezeigt, wie durch die Nutzung standardisierter Datenformate ein sogenanntes mechatronisches Anlagenmodell, oft auch als digitaler Zwilling bezeichnet, implizit aus den Konstruktionsdaten generiert werden kann und in allen folgenden Phasen des Anlagenlebenszyklus weiter-
verwendet wird. |
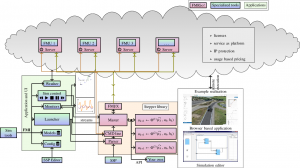 | Lacoursière, Claude; Härdin, Tomas: FMIGo! A runtime environment for FMI based simulation.. In: 2018. @article{lacoursierefmigo,
title = {FMIGo! A runtime environment for FMI based simulation.},
author = {Claude Lacoursière and Tomas Härdin},
url = {https://www.fmigo.net/
https://github.com/fmi-tools/FMIGo
https://webapps.cs.umu.se/uminf/reports/2018/003/part1.pdf},
year = {2018},
date = {2018-01-01},
abstract = {We present the software architecture of FMIGo!, a distributed, parallel runtime environment for executing Functional Mockup Interface (FMI) based simulations, describe how to use it, and how to extend its functionality. FMI is a standard used to define what Functional Mockup Units (FMU)s – or modules – can expose in terms of inputs and outputs, and the proper execution or call sequence one can perform on said FMUs. The FMI does not define the mathematics of modular time integration, a problem addressed by FMIGo! in an extensible way. Also included are some theoretical and experimental aspects of different stepping schemes, or numerical methods to simulate coupled, modular systems. In particular, we present a kinematic solver which corresponds to Differential Algebraic Conditions between modules, as well as wrapper FMUs designed to augment the functionality of a given FMU with, for instance, input and output filters and directional derivatives, features rarely present in modules. FMIGo! is open source under the MIT license and is meant to implement only the functionality required by steppers, as well as different stepping schemes. },
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
We present the software architecture of FMIGo!, a distributed, parallel runtime environment for executing Functional Mockup Interface (FMI) based simulations, describe how to use it, and how to extend its functionality. FMI is a standard used to define what Functional Mockup Units (FMU)s – or modules – can expose in terms of inputs and outputs, and the proper execution or call sequence one can perform on said FMUs. The FMI does not define the mathematics of modular time integration, a problem addressed by FMIGo! in an extensible way. Also included are some theoretical and experimental aspects of different stepping schemes, or numerical methods to simulate coupled, modular systems. In particular, we present a kinematic solver which corresponds to Differential Algebraic Conditions between modules, as well as wrapper FMUs designed to augment the functionality of a given FMU with, for instance, input and output filters and directional derivatives, features rarely present in modules. FMIGo! is open source under the MIT license and is meant to implement only the functionality required by steppers, as well as different stepping schemes. |
2017
|
 | Servin, Martin; Berglund, Tomas; Boström, J: Computational modeling of flow and size segregation in a stockpile with multiple outlets. Particles 2017, 2017. @conference{servincomputational,
title = {Computational modeling of flow and size segregation in a stockpile with multiple outlets},
author = {Martin Servin and Tomas Berglund and J Boström},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/Stock_pile_flow_Abstract.pdf},
year = {2017},
date = {2017-01-01},
booktitle = {Particles 2017},
abstract = {Gravity reclaim stockpiles are widely used for storing large amounts of granular materials. Material is added to the surface via conveyors and is drawn from one or multiple outlets at the base of the pile, at a speed controlled with belt or apron feeders. In silos, the discharge typically occur as mass flow, which means that all the material move downwards at approximately the same speed and with little size segregation. The flow pattern in stockpiles, on the other hand, is that of funnel flow, where the material flow through vertical channels formed over each outlet [1]. These channels of active flow are surrounded by material that is stagnant, except near the surface where material flowing when the angle of repose is exceeded. Stockpiles are subject to significant size segregation due to several mechanisms [1,2]. The material is normally segregated already on the incoming conveyor and this is enhanced by trajectory segregation. Rolling and sifting segregation occur when the material spread on the pile surface. Segregation by percolation takes place in the shear zones between the funnel flow and stagnant zones.
We estimate the flow pattern and size segregation transport coefficients in a stockpile model with multiple outlet using the nonsmooth discrete element method [3,4]. Based on the analysis, similar to [5], a kinematic hybrid particle-cellular automata stockpile model is developed. Finally, we examine the possibility of realtime monitoring of the transport and the size segregation in a stockpile and feasibility of maintaining an net outflow with stable size distribution by controlling flow rate of the individual outlets.
},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {conference}
}
Gravity reclaim stockpiles are widely used for storing large amounts of granular materials. Material is added to the surface via conveyors and is drawn from one or multiple outlets at the base of the pile, at a speed controlled with belt or apron feeders. In silos, the discharge typically occur as mass flow, which means that all the material move downwards at approximately the same speed and with little size segregation. The flow pattern in stockpiles, on the other hand, is that of funnel flow, where the material flow through vertical channels formed over each outlet [1]. These channels of active flow are surrounded by material that is stagnant, except near the surface where material flowing when the angle of repose is exceeded. Stockpiles are subject to significant size segregation due to several mechanisms [1,2]. The material is normally segregated already on the incoming conveyor and this is enhanced by trajectory segregation. Rolling and sifting segregation occur when the material spread on the pile surface. Segregation by percolation takes place in the shear zones between the funnel flow and stagnant zones.
We estimate the flow pattern and size segregation transport coefficients in a stockpile model with multiple outlet using the nonsmooth discrete element method [3,4]. Based on the analysis, similar to [5], a kinematic hybrid particle-cellular automata stockpile model is developed. Finally, we examine the possibility of realtime monitoring of the transport and the size segregation in a stockpile and feasibility of maintaining an net outflow with stable size distribution by controlling flow rate of the individual outlets.
|
 | Servin, Martin; Berglund, Tomas; Mickelsson, Kjell-Ove: Impact force analysis with the nonsmooth discrete element method. Particles 2017, 2017. @conference{servinimpact,
title = {Impact force analysis with the nonsmooth discrete element method},
author = {Martin Servin and Tomas Berglund and Kjell-Ove Mickelsson},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/Impact_Analysis_Abstract.pdf},
year = {2017},
date = {2017-01-01},
booktitle = {Particles 2017},
abstract = {Analysis of impact forces is applicable for predicting particle breakage and equipment wear in systems for transportation and storage of granular materials, such as iron ore pellets [1,2]. The nonsmooth discrete element method (NDEM) [3,4] can be understood as a time-implicit version of the conventional, or smooth, discrete element method (DEM). The NDEM enable large time-step integration by allowing the velocities to change discontinuously in accordance with an imposed contact and impact law, expressed in terms of inequality and complementarity conditions, in addition to the rigid body equations of motion. In some applications this shorten the simulation time by several orders in magnitude [4] and thus enable quick design experiments and systematic exploration of the design and parameter space. An apparent deficiency with the NDEM is that the force that occur due to highvelocity impacts is not explicitly computed. Instead, the NDEM solver compute the net impulse that is necessary for fulfilling the imposed contact and impact law. The conditions for particle breakage and surface wear are directly dependent on the contact force and not the impulse.
A method is presented for a posteriori computation of the impact contact forces from NDEM impulses. For pair-wise contacts, the equivalent contact force can be deduced from the impulse by assuming the Hertz contact law [5]. This is extended to more complex contact networks, with simultaneous impacts, and validated using smooth DEM simulation. The method is demonstrated by studying systems are representative for transportation and storage of granular materials and analysing the statistical distribution of impact forces and energy dissipation, thus indicating breakage and wear.
},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {conference}
}
Analysis of impact forces is applicable for predicting particle breakage and equipment wear in systems for transportation and storage of granular materials, such as iron ore pellets [1,2]. The nonsmooth discrete element method (NDEM) [3,4] can be understood as a time-implicit version of the conventional, or smooth, discrete element method (DEM). The NDEM enable large time-step integration by allowing the velocities to change discontinuously in accordance with an imposed contact and impact law, expressed in terms of inequality and complementarity conditions, in addition to the rigid body equations of motion. In some applications this shorten the simulation time by several orders in magnitude [4] and thus enable quick design experiments and systematic exploration of the design and parameter space. An apparent deficiency with the NDEM is that the force that occur due to highvelocity impacts is not explicitly computed. Instead, the NDEM solver compute the net impulse that is necessary for fulfilling the imposed contact and impact law. The conditions for particle breakage and surface wear are directly dependent on the contact force and not the impulse.
A method is presented for a posteriori computation of the impact contact forces from NDEM impulses. For pair-wise contacts, the equivalent contact force can be deduced from the impulse by assuming the Hertz contact law [5]. This is extended to more complex contact networks, with simultaneous impacts, and validated using smooth DEM simulation. The method is demonstrated by studying systems are representative for transportation and storage of granular materials and analysing the statistical distribution of impact forces and energy dissipation, thus indicating breakage and wear.
|
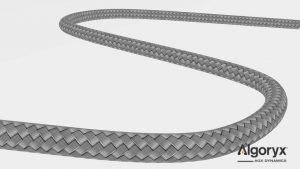 | Sihlberg, Jimmy: Rendering Of Physically Simulated Wires. Department of Computing Science, Umeå University, Sweden, 2017. @mastersthesis{Sihlberg2017,
title = {Rendering Of Physically Simulated Wires},
author = {Jimmy Sihlberg},
url = {https://umu.diva-portal.org/smash/get/diva2:1258642/FULLTEXT01.pdf
http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-152811},
year = {2017},
date = {2017-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {Simulating deformable continious objects such as wires requires some discretization method. In this project we look at how to render simulated multiresolution lumped element wires in real time and the challenges that come with it. First we look how to create a 3D wire geometry on they from a set of constantly changing points. By utilising the idea of extrusion, the geometry can be built from a 2D shape. Special care must be taken to avoid twisting artifacts. To get a smooth curvature, we look at cubic spline methods to integrate the wire elements. We illustrate that the Catmull-Rom curve with Chordal parameterization produces well behaved curves for lower curvatures and for non-equidistant control points. Sharp curvatures proves to be a challenging task, we use the Catmull-Romcurve with Centripetal parameterization together with Cardinal spline and show its limitations. Finally we look at how to render wires with more realism by adding texture to it. Many wires have a symmetric pattern, we illustrate how to make use of this by repeating a symmetric pattern image along the wire. The physical stretching of the wire is also considered when applying texture.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Simulating deformable continious objects such as wires requires some discretization method. In this project we look at how to render simulated multiresolution lumped element wires in real time and the challenges that come with it. First we look how to create a 3D wire geometry on they from a set of constantly changing points. By utilising the idea of extrusion, the geometry can be built from a 2D shape. Special care must be taken to avoid twisting artifacts. To get a smooth curvature, we look at cubic spline methods to integrate the wire elements. We illustrate that the Catmull-Rom curve with Chordal parameterization produces well behaved curves for lower curvatures and for non-equidistant control points. Sharp curvatures proves to be a challenging task, we use the Catmull-Romcurve with Centripetal parameterization together with Cardinal spline and show its limitations. Finally we look at how to render wires with more realism by adding texture to it. Many wires have a symmetric pattern, we illustrate how to make use of this by repeating a symmetric pattern image along the wire. The physical stretching of the wire is also considered when applying texture. |
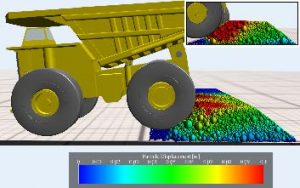 | Thoeni, Klaus; Servin, Martin; Giacomini, Anna: Using non-smooth multi-domain dynamics to improve the safety on haul roads in surface mining. In: PARTICLES V: proceedings of the V International Conference on Particle-Based Methods: fundamentals and applications, pp. 600–611, CIMNE 2017. @inproceedings{thoeni2017using,
title = {Using non-smooth multi-domain dynamics to improve the safety on haul roads in surface mining},
author = {Klaus Thoeni and Martin Servin and Anna Giacomini},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/Thoeni_haul_roads.pdf},
year = {2017},
date = {2017-01-01},
booktitle = {PARTICLES V: proceedings of the V International Conference on Particle-Based Methods: fundamentals and applications},
pages = {600--611},
organization = {CIMNE},
abstract = {The paper presents a preliminary numerical study aimed to improve the safety
on haul roads in surface mining. The interaction and collision between granular berms and
ultra-class haul trucks are investigated by using non-smooth multi-domain dynamics. The
haul truck is modelled as a rigid multibody system and the granular berm as a distribution
of rigid particles using the discrete element method. A non-smooth dynamics approach
is applied to enable stable and time-efficient simulation of the full system with strong
coupling. The numerical model is first calibrated using full-scale data from experimental
tests and then applied to investigate the collision between the haul truck and granular
berms of different geometry under various approach conditions.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
The paper presents a preliminary numerical study aimed to improve the safety
on haul roads in surface mining. The interaction and collision between granular berms and
ultra-class haul trucks are investigated by using non-smooth multi-domain dynamics. The
haul truck is modelled as a rigid multibody system and the granular berm as a distribution
of rigid particles using the discrete element method. A non-smooth dynamics approach
is applied to enable stable and time-efficient simulation of the full system with strong
coupling. The numerical model is first calibrated using full-scale data from experimental
tests and then applied to investigate the collision between the haul truck and granular
berms of different geometry under various approach conditions. |
 | Gregorcic, Bor; Bodin, Madelen: Algodoo: A tool for encouraging creativity in physics teaching and learning. In: The Physics Teacher, vol. 55, no. 1, pp. 25–28, 2017. @article{gregorcic2017algodoo,
title = {Algodoo: A tool for encouraging creativity in physics teaching and learning},
author = {Bor Gregorcic and Madelen Bodin},
url = {https://www.researchgate.net/profile/Bor-Gregorcic/publication/312021107_Algodoo_A_Tool_for_Encouraging_Creativity_in_Physics_Teaching_and_Learning/links/5b6de42f45851546c9fa3f60/Algodoo-A-Tool-for-Encouraging-Creativity-in-Physics-Teaching-and-Learning.pdf},
doi = {10.1119/1.4972493},
year = {2017},
date = {2017-01-01},
journal = {The Physics Teacher},
volume = {55},
number = {1},
pages = {25--28},
publisher = {American Association of Physics Teachers},
abstract = {Algodoo (http://www.algodoo.com) is a digital sandbox for physics 2D simulations. It allows students and teachers to easily create simulated “scenes” and explore physics through a user-friendly and visually attractive interface. In this paper, we present different ways in which students and teachers can use Algodoo to visualize and solve physics problems, investigate phenomena and processes, and engage in out-of-school activities and projects. Algodoo, with its approachable interface, inhabits a middle ground between computer games and “serious” computer modeling. It is suitable as an entry-level modeling tool for students of all ages and can facilitate discussions about the role of computer modeling in physics.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
Algodoo (http://www.algodoo.com) is a digital sandbox for physics 2D simulations. It allows students and teachers to easily create simulated “scenes” and explore physics through a user-friendly and visually attractive interface. In this paper, we present different ways in which students and teachers can use Algodoo to visualize and solve physics problems, investigate phenomena and processes, and engage in out-of-school activities and projects. Algodoo, with its approachable interface, inhabits a middle ground between computer games and “serious” computer modeling. It is suitable as an entry-level modeling tool for students of all ages and can facilitate discussions about the role of computer modeling in physics. |
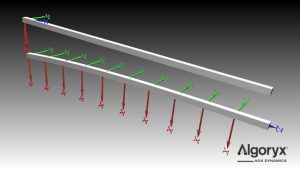 | Forsberg, Hampus: Automatic lumped element discretization of curved beams with variable sectional area. Department of Physics, Umeå University, 2017. @mastersthesis{Forsberg2017,
title = {Automatic lumped element discretization of curved beams with variable sectional area},
author = {Hampus Forsberg},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-145058
http://umu.diva-portal.org/smash/get/diva2:1184054/FULLTEXT01.pdf},
year = {2017},
date = {2017-01-01},
school = {Department of Physics, Umeå University},
abstract = {Calculations on stress, strain and deformation are typically made using finite element methods (FEM). An alternative to this is a rigid bodydynamics approach also called lumped element method (LEM). LEM implements deformation by replacing single rigid bodies with multiple subbodies, which are in turn connected with joints (also called constraints) that allow movement between the sub-bodies. If instead of FEM, a lumped element method is used to simulate deformable objects, sufficient accuracy can be obtained at a much lower cost, complexity-wise. A lumped element method-approach could for example achieve real-time simulationspeed.
The purpose of this thesis is to expand upon previous work into LEM, analyzing how the rigid bodies and constraints should be configured to produce accurate results for a wider range of objects. Specifically, beams of varying cross section and curved beam axis, as well as other test cases. The simulated values are compared with the analytic predictions given by Euler-Bernoulli beam theory.
These simulations are implemented using the AGX Dynamics physics engine from Algoryx Simulation AB.
One intended application area of LEM is crane arms. This motivates the focus on analyzing how LEM behaves when simulating beams, as they represent the most basic version of crane arms. Simulation and testing of full crane objects was unfortunately not accomplished, partly due to a lack of convenient testing data. Further work is needed to confirm that LEM behaves well for these expanded cases as well.
In addition to the analysis section above, the purpose is also to implement a pipeline for automatic conversion of a CAD-model to a lumped element version in AGX. Specifically, a CAD-model given in the 3D-modeling software SpaceClaim.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Calculations on stress, strain and deformation are typically made using finite element methods (FEM). An alternative to this is a rigid bodydynamics approach also called lumped element method (LEM). LEM implements deformation by replacing single rigid bodies with multiple subbodies, which are in turn connected with joints (also called constraints) that allow movement between the sub-bodies. If instead of FEM, a lumped element method is used to simulate deformable objects, sufficient accuracy can be obtained at a much lower cost, complexity-wise. A lumped element method-approach could for example achieve real-time simulationspeed.
The purpose of this thesis is to expand upon previous work into LEM, analyzing how the rigid bodies and constraints should be configured to produce accurate results for a wider range of objects. Specifically, beams of varying cross section and curved beam axis, as well as other test cases. The simulated values are compared with the analytic predictions given by Euler-Bernoulli beam theory.
These simulations are implemented using the AGX Dynamics physics engine from Algoryx Simulation AB.
One intended application area of LEM is crane arms. This motivates the focus on analyzing how LEM behaves when simulating beams, as they represent the most basic version of crane arms. Simulation and testing of full crane objects was unfortunately not accomplished, partly due to a lack of convenient testing data. Further work is needed to confirm that LEM behaves well for these expanded cases as well.
In addition to the analysis section above, the purpose is also to implement a pipeline for automatic conversion of a CAD-model to a lumped element version in AGX. Specifically, a CAD-model given in the 3D-modeling software SpaceClaim. |
2016
|
 | Törnqvist, Martin: Simulation in the Control Loop: Control and Collision Detection for Collaborative Robots. Electrical Engineering, KTH, Stockholm, Sweden, 2016. @mastersthesis{Tornqvist2016,
title = {Simulation in the Control Loop: Control and Collision Detection for Collaborative Robots},
author = {Martin Törnqvist},
url = {https://www.algoryx.se/mainpage/wp-content/uploads/2021/04/Törnqvist_Simulation-in-the-Control-Loop-Control-and-Collision-Detection-for-Collaborative-Robots.pdf},
year = {2016},
date = {2016-03-18},
address = {Stockholm, Sweden},
school = {Electrical Engineering, KTH},
abstract = {Control and simulation are two areas heavily utilized in robotics research, and simulation is often used as a way to test and optimize control algorithms. Some controllers are even able to perform simulations, as is the case with ABB's virtual controller. Despite many similarities in the dynamics of model based controllers and physics simulation, using a simulation to perform dynamics calculations for controllers remains relatively uncharted territory. This report presents a general simulation-based controller that integrates simulation into every part of the control loop: from motion planning to model-based control and collision detection. The controller is implemented and tested on the ABB Yumi collaborative robot.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Control and simulation are two areas heavily utilized in robotics research, and simulation is often used as a way to test and optimize control algorithms. Some controllers are even able to perform simulations, as is the case with ABB's virtual controller. Despite many similarities in the dynamics of model based controllers and physics simulation, using a simulation to perform dynamics calculations for controllers remains relatively uncharted territory. This report presents a general simulation-based controller that integrates simulation into every part of the control loop: from motion planning to model-based control and collision detection. The controller is implemented and tested on the ABB Yumi collaborative robot. |
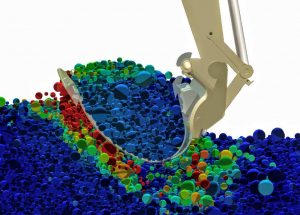 | Servin, Martin; Wang, Da: Adaptive model reduction for nonsmooth discrete element simulation. In: Computational Particle Mechanics, vol. 3, no. 1, pp. 107–121, 2016. @article{servin2016adaptive,
title = {Adaptive model reduction for nonsmooth discrete element simulation},
author = {Martin Servin and Da Wang},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/model_reduction.pdf
http://umit.cs.umu.se/modelreduction/},
doi = {doi:10.1007/s40571-015-0100-5},
year = {2016},
date = {2016-01-01},
journal = {Computational Particle Mechanics},
volume = {3},
number = {1},
pages = {107--121},
publisher = {Springer},
abstract = {A method for adaptive model order reduction for nonsmooth discrete element simulation is developed and analysed in numerical experiments. Regions of the granular media that collectively move as rigid bodies are substituted with rigid bodies of the corresponding shape and mass distribution. The method also support particles merging with articulated multibody systems. A model approximation error is defined and used to derive conditions for when and where to apply reduction and refinement back into particles and smaller rigid bodies. Three methods for refinement are proposed and tested: prediction from contact events, trial solutions computed in the background and using split sensors. The computational performance can be increased by 5 - 50 times for model reduction level between 70 - 95 %.
},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
A method for adaptive model order reduction for nonsmooth discrete element simulation is developed and analysed in numerical experiments. Regions of the granular media that collectively move as rigid bodies are substituted with rigid bodies of the corresponding shape and mass distribution. The method also support particles merging with articulated multibody systems. A model approximation error is defined and used to derive conditions for when and where to apply reduction and refinement back into particles and smaller rigid bodies. Three methods for refinement are proposed and tested: prediction from contact events, trial solutions computed in the background and using split sensors. The computational performance can be increased by 5 - 50 times for model reduction level between 70 - 95 %.
|
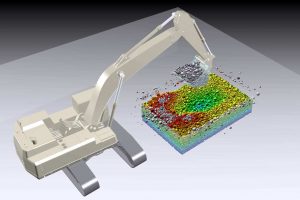 | Wang, Da; Servin, Martin; Berglund, Tomas: Warm starting the projected Gauss--Seidel algorithm for granular matter simulation. In: Computational Particle Mechanics, vol. 3, no. 1, pp. 43–52, 2016. @article{wang2016warm,
title = {Warm starting the projected Gauss--Seidel algorithm for granular matter simulation},
author = {Da Wang and Martin Servin and Tomas Berglund},
url = {https://link.springer.com/article/10.1007/s40571-015-0088-x
http://umit.cs.umu.se/granular/warmstarting/},
doi = {doi:10.1007/s40571-015-0088-x},
year = {2016},
date = {2016-01-01},
journal = {Computational Particle Mechanics},
volume = {3},
number = {1},
pages = {43--52},
publisher = {Springer},
abstract = {The effect on the convergence of warm starting the projected Gauss–Seidel solver for nonsmooth discrete element simulation of granular matter are investigated. It is found that the computational performance can be increased by a factor 2–5.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
The effect on the convergence of warm starting the projected Gauss–Seidel solver for nonsmooth discrete element simulation of granular matter are investigated. It is found that the computational performance can be increased by a factor 2–5. |
 | Sundling, Emma: Validation Toolbox for a Physics Engine. Department of Physics, Umeå University, 2016. @mastersthesis{Sundling2016,
title = {Validation Toolbox for a Physics Engine},
author = {Emma Sundling},
url = {http://umu.diva-portal.org/smash/get/diva2:935814/FULLTEXT01.pdf
http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-121972},
year = {2016},
date = {2016-01-01},
school = {Department of Physics, Umeå University},
abstract = {Physics engines become more and more common due to the rapid development and increasing demand of simulations. With this comes a need of testing the engine, a way to measure its performance, not only its speed but also its accuracy and stability. The purpose of this thesis has been to create a set of benchmark tests. They aim to check the physical aspects, especially mechanics, of the engine. A strategy and export functions for the test results in order to automate the testing have also been developed.
The resulting tests became a beam on piles which analyses constraint stability, an overdetermined system consisting of a static door on multiple hinges, a falling object investigating the accuracy of the integrator, a box on an inclined plane for testing the friction model, a single pendulum as well as a multibody pendulum checking constraint accuracy and energy conservation, the Earth orbiting around the Sun which tests the stability of the integrator and finally a cantilever beam that is a static test of a real scenario. After the tests are performed the results are presented on an HTML-page. A prototype of a Web application is also established as well as a set of scalar tests that can be performed continuously, in order to follow trends or compare the engine's performance from time to time.
This thesis was initialized by Algoryx Simulation AB which also provided the engine, AgX Dynamics, with the numerical method called SPOOK. It mainly performed well on all tests. In order to build a fully general toolbox more tests need to be added such as material interactions, scalable test with thousands of bodies, torque tests as well as more complex scenarios, for example a scissor lift and robots. The work can also be extended with more developed export functions, both to the Web and to documents. Hopefully this thesis can be seen as a complement to the earlier efforts done in creating a general set of benchmarks and automation framework for continuous integration and testing.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Physics engines become more and more common due to the rapid development and increasing demand of simulations. With this comes a need of testing the engine, a way to measure its performance, not only its speed but also its accuracy and stability. The purpose of this thesis has been to create a set of benchmark tests. They aim to check the physical aspects, especially mechanics, of the engine. A strategy and export functions for the test results in order to automate the testing have also been developed.
The resulting tests became a beam on piles which analyses constraint stability, an overdetermined system consisting of a static door on multiple hinges, a falling object investigating the accuracy of the integrator, a box on an inclined plane for testing the friction model, a single pendulum as well as a multibody pendulum checking constraint accuracy and energy conservation, the Earth orbiting around the Sun which tests the stability of the integrator and finally a cantilever beam that is a static test of a real scenario. After the tests are performed the results are presented on an HTML-page. A prototype of a Web application is also established as well as a set of scalar tests that can be performed continuously, in order to follow trends or compare the engine's performance from time to time.
This thesis was initialized by Algoryx Simulation AB which also provided the engine, AgX Dynamics, with the numerical method called SPOOK. It mainly performed well on all tests. In order to build a fully general toolbox more tests need to be added such as material interactions, scalable test with thousands of bodies, torque tests as well as more complex scenarios, for example a scissor lift and robots. The work can also be extended with more developed export functions, both to the Web and to documents. Hopefully this thesis can be seen as a complement to the earlier efforts done in creating a general set of benchmarks and automation framework for continuous integration and testing. |
2015
|
 | Nordberg, John; Servin, Martin; Bergsten, Urban: Modeling and validation of an elastoplastic terrain model for simulation of forestry machines. 11th World Congress on Computational Mechanics (WCCM XI), July 20 - 25, 2014, Barcelona, Spain, 2015. @conference{nordberg1modeling,
title = {Modeling and validation of an elastoplastic terrain model for simulation of forestry machines},
author = {John Nordberg and Martin Servin and Urban Bergsten},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/abstract_terrain_WCCMXI.pdf},
year = {2015},
date = {2015-07-20},
booktitle = {11th World Congress on Computational Mechanics (WCCM XI), July 20 - 25, 2014, Barcelona, Spain},
abstract = {A framework for non-smooth multidomain mechanics [1] is applied to develop real time interactive simulation of a forest machine. These are used for exploration and evaluation of new designs of machines, tools and work methods in forestry with the possibility to measure productivity [2], fuel economy, ground damages and mobility [3].
The framework has recently been extended to include dynamical terrain, modeled as an elastoplastic solid using particle based discretization similar to [4] [5]. A capped plasticity model [6] [5] is employed to include the effects of soil compaction in the terrain.
In the present study we describe a mapping of existing terrain measurements [7] [8] [9] to the developed elastoplastic terrain model and numerical scheme. We also propose test system and procedures for parameter identification and for validation. The test systems include simple plate or cone tests as well as full vehicles equipped with industry standard wheels and tracked bogies. Finally, we present preliminary results from simulations of forestry machines with different type of tracked bogies.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {conference}
}
A framework for non-smooth multidomain mechanics [1] is applied to develop real time interactive simulation of a forest machine. These are used for exploration and evaluation of new designs of machines, tools and work methods in forestry with the possibility to measure productivity [2], fuel economy, ground damages and mobility [3].
The framework has recently been extended to include dynamical terrain, modeled as an elastoplastic solid using particle based discretization similar to [4] [5]. A capped plasticity model [6] [5] is employed to include the effects of soil compaction in the terrain.
In the present study we describe a mapping of existing terrain measurements [7] [8] [9] to the developed elastoplastic terrain model and numerical scheme. We also propose test system and procedures for parameter identification and for validation. The test systems include simple plate or cone tests as well as full vehicles equipped with industry standard wheels and tracked bogies. Finally, we present preliminary results from simulations of forestry machines with different type of tracked bogies. |
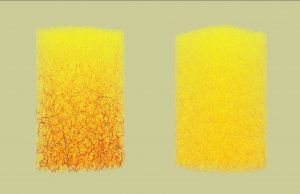 | Pettersson, Thomas: Analysis and implementation of the Smooth Discrete Element Method in AGX. Faculty of Science & Engineering, Linköping University, 2015. @mastersthesis{Pettersson2015,
title = {Analysis and implementation of the Smooth Discrete Element Method in AGX},
author = {Thomas Pettersson},
editor = {Thomas Pettersson},
url = {http://liu.diva-portal.org/smash/get/diva2:856766/FULLTEXT02.pdf
http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aliu%3Adiva-121563},
year = {2015},
date = {2015-01-01},
school = {Faculty of Science & Engineering, Linköping University},
abstract = {We encounter granular materials on a daily basis. We walk up a gravel path or we eat our breakfast cereals. When handling granular materials on an industrial scale it is important to do so efficiently, to avoid unnecessary energy losses, wear and tear. To help designing efficient tools for handling these materials engineers uses numerical simulations.
This project investigates the difference between the two main approaches to simulation of granular materials, the Smooth- and Non-smooth Discrete Element Methods by implementing the Smooth method into AgX dynamics were the Non-smooth method already is implemented, and then setup and execute a range of experiments to investigate their differences.
The investigation shows both advantages and weaknesses for both methods. The result of simulations with smooth discrete element method are more consistent than with the nonsmooth discrete element method with respect to choice of time step and other parameters that can be chosen for the simulation. Smooth discrete element method have problems when it comes to extreme situations.
The relative simulation time for system as large as treated by this project (more than1000) can not be shown to depend on the size of the system.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
We encounter granular materials on a daily basis. We walk up a gravel path or we eat our breakfast cereals. When handling granular materials on an industrial scale it is important to do so efficiently, to avoid unnecessary energy losses, wear and tear. To help designing efficient tools for handling these materials engineers uses numerical simulations.
This project investigates the difference between the two main approaches to simulation of granular materials, the Smooth- and Non-smooth Discrete Element Methods by implementing the Smooth method into AgX dynamics were the Non-smooth method already is implemented, and then setup and execute a range of experiments to investigate their differences.
The investigation shows both advantages and weaknesses for both methods. The result of simulations with smooth discrete element method are more consistent than with the nonsmooth discrete element method with respect to choice of time step and other parameters that can be chosen for the simulation. Smooth discrete element method have problems when it comes to extreme situations.
The relative simulation time for system as large as treated by this project (more than1000) can not be shown to depend on the size of the system. |
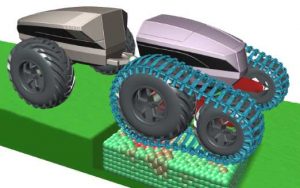 | Nordberg, John; Servin, Martin: Meshfree elastoplastic solid for nonsmooth multidomain dynamics. In: arXiv preprint arXiv:1611.03741, 2015. @article{nordberg2015meshfree,
title = {Meshfree elastoplastic solid for nonsmooth multidomain dynamics},
author = {John Nordberg and Martin Servin},
url = {https://arxiv.org/abs/1611.03741
https://arxiv.org/abs/1611.03741
},
year = {2015},
date = {2015-01-01},
journal = {arXiv preprint arXiv:1611.03741},
abstract = {A method for simulation of elastoplastic solids in multibody systems with nonsmooth and multidomain dynamics is developed. The solid is discretised into pseudo-particles using the meshfree moving least squares method. The particles carry strain and stress tensor variables that are mapped to deformation constraints and constraint forces. The discretised solid model thus fit a unified framework for nonsmooth multidomain dynamics for realtime simulations including strong coupling of rigid multibodies with complex kinematic constraints such as articulation joints, unilateral contacts with dry friction, drivelines and hydraulics. The nonsmooth formulation allow for impulses, due to impacts for instance, to propagate instantly between the rigid multibody and the solid. Plasticity is introduced through an associative perfectly plastic modified Drucker-Prager model. The elastic and plastic dynamics is verified for simple test systems and the capability of simulating tracked terrain vehicles driving on a deformable terrain is demonstrated.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
A method for simulation of elastoplastic solids in multibody systems with nonsmooth and multidomain dynamics is developed. The solid is discretised into pseudo-particles using the meshfree moving least squares method. The particles carry strain and stress tensor variables that are mapped to deformation constraints and constraint forces. The discretised solid model thus fit a unified framework for nonsmooth multidomain dynamics for realtime simulations including strong coupling of rigid multibodies with complex kinematic constraints such as articulation joints, unilateral contacts with dry friction, drivelines and hydraulics. The nonsmooth formulation allow for impulses, due to impacts for instance, to propagate instantly between the rigid multibody and the solid. Plasticity is introduced through an associative perfectly plastic modified Drucker-Prager model. The elastic and plastic dynamics is verified for simple test systems and the capability of simulating tracked terrain vehicles driving on a deformable terrain is demonstrated. |
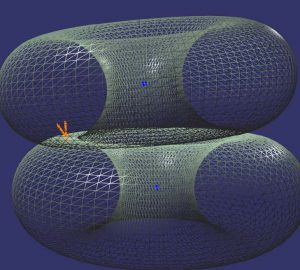 | Sandqvist, Jonas: Collision detection using boundary representation, BREP. Department of Physics, Umeå University, 2015. @mastersthesis{Sandqvist2015,
title = {Collision detection using boundary representation, BREP},
author = {Jonas Sandqvist},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-102531
http://umu.diva-portal.org/smash/get/diva2:808317/FULLTEXT01.pdf
},
year = {2015},
date = {2015-01-01},
school = {Department of Physics, Umeå University},
abstract = {This thesis treats how to generate collision information for multibody simulations in AgX Dynamicswhere the geometries are described with the data structure boundary representation, BREP. BREP is adata structure that contains the exact mathematical description of each individual surface. To describecomplex surfaces exact and efficient non uniform rational basis spline, NURBS, is used and for trivialsurfaces like planes or spheres simpler equations is used. Since all surfaces in a BREP is described veryaccurate, the accuracy for the collision information can be set high without affecting the amount of dataneeded to describe the geometries.To make AgX Dynamics able to calculate forces in a multibody simulation, collision informationabout were and how much two geometries are intersecting is required. The collision information containswere the overlap between two geometries is, how much the objects have penetrated each other and thedirection for which the objects have to separate. To find the penetration depth and the overlap theNewton Raphson method were used. The experiments conducted, showed that it is possible to useBREPs as a description of geometries to produce the collision information needed for the physics engineused by AgX Dynamics to handle collisions. A comparison between trimesh and BREP for producingthe collision information, shows that data usage is much lower for the representation of geometries withBREPs than trimesh. The results also shows that the accuracy can be significantly higher than fortrimesh as the data usage for trimesh becomes non practical to handle when the required accuracy ishigh. With the high accuracy and with the smooth surfaces used with the BREP the artificial friction isalmost negligible except for cases were intersection points could not be found all around the intersectioncurves due to limitations in the algorithm.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
This thesis treats how to generate collision information for multibody simulations in AgX Dynamicswhere the geometries are described with the data structure boundary representation, BREP. BREP is adata structure that contains the exact mathematical description of each individual surface. To describecomplex surfaces exact and efficient non uniform rational basis spline, NURBS, is used and for trivialsurfaces like planes or spheres simpler equations is used. Since all surfaces in a BREP is described veryaccurate, the accuracy for the collision information can be set high without affecting the amount of dataneeded to describe the geometries.To make AgX Dynamics able to calculate forces in a multibody simulation, collision informationabout were and how much two geometries are intersecting is required. The collision information containswere the overlap between two geometries is, how much the objects have penetrated each other and thedirection for which the objects have to separate. To find the penetration depth and the overlap theNewton Raphson method were used. The experiments conducted, showed that it is possible to useBREPs as a description of geometries to produce the collision information needed for the physics engineused by AgX Dynamics to handle collisions. A comparison between trimesh and BREP for producingthe collision information, shows that data usage is much lower for the representation of geometries withBREPs than trimesh. The results also shows that the accuracy can be significantly higher than fortrimesh as the data usage for trimesh becomes non practical to handle when the required accuracy ishigh. With the high accuracy and with the smooth surfaces used with the BREP the artificial friction isalmost negligible except for cases were intersection points could not be found all around the intersectioncurves due to limitations in the algorithm. |
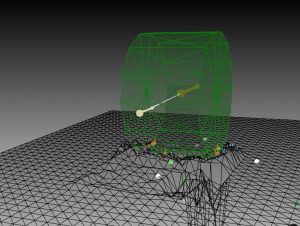 | Agvik, Simon: A deformable terrain model in multi-domain dynamics using elastoplastic constraints: An adaptive approach. Department of Physics, Umeå University, 2015. @mastersthesis{Agvik2015,
title = {A deformable terrain model in multi-domain dynamics using elastoplastic constraints: An adaptive approach},
author = {Simon Agvik},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-108328
http://umu.diva-portal.org/smash/get/diva2:852371/FULLTEXT01.pdf},
year = {2015},
date = {2015-01-01},
school = {Department of Physics, Umeå University},
abstract = {Achieving realistic simulations of terrain vehicles in their work environment does not only require a careful model of the vehicle itself but the vehicle's interactions with the surroundings are equally important. For off-road ground vehicles the terrain will heavily affect the behaviour of the vehicle and thus puts great demands on the terrain model.
The purpose of this project has been to develop and evaluate a deformable terrain model, meant to be used in real-time simulations with multi-body dynamics. The proposed approach is a modification of an existing elastoplastic model based on linear elasticity theory and a capped Drucker-Prager model, using it in an adaptive way. The original model can be seen as a system of rigid bodies connected by elastoplastic constraints, representing the terrain. This project investigates if it is possible to create dynamic bodies just when it is absolutely necessary, and store information about possible deformations in a grid.
Two methods used for transferring information between the dynamic bodies and the grid have been evaluated; an interpolating approach and a discrete approach. The test results indicate that the interpolating approach is preferable, with better stability to an equal performance cost. However, stability problems still exist that have to be solved if the model should be useful in a commercial product.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Achieving realistic simulations of terrain vehicles in their work environment does not only require a careful model of the vehicle itself but the vehicle's interactions with the surroundings are equally important. For off-road ground vehicles the terrain will heavily affect the behaviour of the vehicle and thus puts great demands on the terrain model.
The purpose of this project has been to develop and evaluate a deformable terrain model, meant to be used in real-time simulations with multi-body dynamics. The proposed approach is a modification of an existing elastoplastic model based on linear elasticity theory and a capped Drucker-Prager model, using it in an adaptive way. The original model can be seen as a system of rigid bodies connected by elastoplastic constraints, representing the terrain. This project investigates if it is possible to create dynamic bodies just when it is absolutely necessary, and store information about possible deformations in a grid.
Two methods used for transferring information between the dynamic bodies and the grid have been evaluated; an interpolating approach and a discrete approach. The test results indicate that the interpolating approach is preferable, with better stability to an equal performance cost. However, stability problems still exist that have to be solved if the model should be useful in a commercial product. |
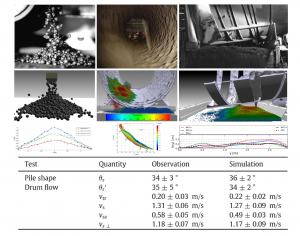 | Servin, Martin; Berglund, Tomas; Mickelsson, Kjell-Ove; Rönnbäck, Stefan; Wang, Da: Modeling and simulation of a granulation system using a nonsmooth discrete element method. In: ECCOMAS IV international conference on particle-based methods 2015, 2015. @inproceedings{servin2015modeling,
title = {Modeling and simulation of a granulation system using a nonsmooth discrete element method},
author = {Martin Servin and Tomas Berglund and Kjell-Ove Mickelsson and Stefan Rönnbäck and Da Wang},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/granulationsystem.pdf
http://umit.cs.umu.se/modsimcomplmech/docs/papers/granulation_system.pdf},
year = {2015},
date = {2015-01-01},
booktitle = {ECCOMAS IV international conference on particle-based methods 2015},
abstract = {Granulation is the process of forming macroscopic granules, e.g. tablets or pellets, from microscopic particles. A common system for continuous granulation consist of a rotary drum or disc, a sieve and chrusher connected in a circuit by a number of conveyors. The granulation occur in the drum (or disc) and the main mechanisms are nucleation, layering, coalescence and breakage [1]. The process can be controlled by drum velocity and feed rate of fine material, binding agencies and moisture. The geometric design of components affect the material flow and thus the sieving capacity and ultimately the production capacity. Many granulation plants operate well below their capacity and suffer from high recycle rates and dynamic instabilities [2].
The main challenge of modelling and simulation of granulation processes is the occurrence of multiple length and time scales. The traditional approaches are typically focused either the largescale level of processing units or on the microscale level of particles. A complete model of a granulation process need to include also the intermediate scale of granule dynamics [1]. This is, however, a very challenging computational task given the vast number of granules, typically many millions or more.
We present a meso-scale approach to modeling and simulating iron ore granulation systems with granules modeled as nonsmooth discrete elements (NDEM) [3-6]. This extend a previous iron ore granule model [7] used for balling drum outlet design simulation [8]. Ore fines and moisture is modeled by a quasiparticle model for slurry [9]. Interaction models for nucleation, layering, coalescence and breakage are proposed and tested in a virtual balling circuit. The computational performance is analysed and different methods for accelerating the NDEM computations are tested.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
Granulation is the process of forming macroscopic granules, e.g. tablets or pellets, from microscopic particles. A common system for continuous granulation consist of a rotary drum or disc, a sieve and chrusher connected in a circuit by a number of conveyors. The granulation occur in the drum (or disc) and the main mechanisms are nucleation, layering, coalescence and breakage [1]. The process can be controlled by drum velocity and feed rate of fine material, binding agencies and moisture. The geometric design of components affect the material flow and thus the sieving capacity and ultimately the production capacity. Many granulation plants operate well below their capacity and suffer from high recycle rates and dynamic instabilities [2].
The main challenge of modelling and simulation of granulation processes is the occurrence of multiple length and time scales. The traditional approaches are typically focused either the largescale level of processing units or on the microscale level of particles. A complete model of a granulation process need to include also the intermediate scale of granule dynamics [1]. This is, however, a very challenging computational task given the vast number of granules, typically many millions or more.
We present a meso-scale approach to modeling and simulating iron ore granulation systems with granules modeled as nonsmooth discrete elements (NDEM) [3-6]. This extend a previous iron ore granule model [7] used for balling drum outlet design simulation [8]. Ore fines and moisture is modeled by a quasiparticle model for slurry [9]. Interaction models for nucleation, layering, coalescence and breakage are proposed and tested in a virtual balling circuit. The computational performance is analysed and different methods for accelerating the NDEM computations are tested. |
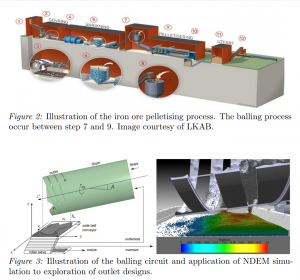 | Wang, Da: Accelerated granular matter simulation. Umeå University, 2015. @phdthesis{wang2015accelerated,
title = {Accelerated granular matter simulation},
author = {Da Wang},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/Wang_Accelerated%20granular%20matter%20simulation.pdf
http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-110164
https://youtu.be/HPb-TNT2YNQ},
year = {2015},
date = {2015-01-01},
school = {Umeå University},
abstract = {Modeling and simulation of granular matter has important applications in both natural science and industry. One widely used method is the discrete element method (DEM). It can be used for simulating granular matter in the gaseous, liquid as well as solid regime whereas alternative methods are in general applicable to only one. Discrete element analysis of large systems is, however, limited by long computational time. A number of solutions to radically improve the computational efficiency of DEM simulations are developed and analysed. These include treating the material as a nonsmooth dynamical system and methods for reducing the computational effort for solving the complementarity problem that arise from implicit treatment of the contact laws. This allow for large time-step integration and ultimately more and faster simulation studies or analysis of more complex systems. Acceleration methods that can reduce the computational complexity and degrees of freedom have been invented. These solutions are investigated in numerical experiments, validated using experimental data and applied for design exploration of iron ore pelletising systems.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {phdthesis}
}
Modeling and simulation of granular matter has important applications in both natural science and industry. One widely used method is the discrete element method (DEM). It can be used for simulating granular matter in the gaseous, liquid as well as solid regime whereas alternative methods are in general applicable to only one. Discrete element analysis of large systems is, however, limited by long computational time. A number of solutions to radically improve the computational efficiency of DEM simulations are developed and analysed. These include treating the material as a nonsmooth dynamical system and methods for reducing the computational effort for solving the complementarity problem that arise from implicit treatment of the contact laws. This allow for large time-step integration and ultimately more and faster simulation studies or analysis of more complex systems. Acceleration methods that can reduce the computational complexity and degrees of freedom have been invented. These solutions are investigated in numerical experiments, validated using experimental data and applied for design exploration of iron ore pelletising systems. |
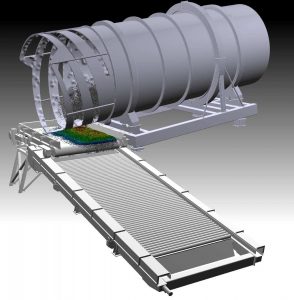 | Wang, Da; Servin, Martin; Berglund, Tomas; Mickelsson, Kjell-Ove; Rönnbäck, Stefan: Parametrization and validation of a nonsmooth discrete element method for simulating flows of iron ore green pellets. In: Powder Technology, vol. 283, pp. 475-487, 2015, ISSN: 0032-5910. @article{WANG2015475,
title = {Parametrization and validation of a nonsmooth discrete element method for simulating flows of iron ore green pellets},
author = {Da Wang and Martin Servin and Tomas Berglund and Kjell-Ove Mickelsson and Stefan Rönnbäck},
url = {https://www.sciencedirect.com/science/article/pii/S0032591015004350
http://umit.cs.umu.se/modsimcomplmech/docs/papers/particle_validation.pdf
https://www.youtube.com/watch?v=SzHfdWj7PfQ&spfreload=10
http://umit.cs.umu.se/granular/video/
},
doi = {https://doi.org/10.1016/j.powtec.2015.05.040},
issn = {0032-5910},
year = {2015},
date = {2015-01-01},
journal = {Powder Technology},
volume = {283},
pages = {475-487},
abstract = {The nonsmooth discrete element method (NDEM) has the potential of high computational efficiency for rapid exploration of large design space of systems for processing and transportation of mineral ore. We present parametrization, verification and validation of a simulation model based on NDEM for iron ore green pellet flow in balling circuits. Simulations are compared with camera based measurements of individual pellet motion as well as bulk behavior of pellets on conveyors and in rotating balling drum. It is shown that the NDEM simulation model is applicable for the purpose of analysis, design and control of iron ore pelletizing systems. The sensitivity to model and simulation parameters is investigated. It is found that: the errors associated with large time-step integration do not cause statistically significant errors to the bulk behavior; rolling resistance is a necessary model component; and the outlet flow from the drum is sensitive to fine material adhering to the outlet creating a thick coating that narrows the outlet gaps.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
The nonsmooth discrete element method (NDEM) has the potential of high computational efficiency for rapid exploration of large design space of systems for processing and transportation of mineral ore. We present parametrization, verification and validation of a simulation model based on NDEM for iron ore green pellet flow in balling circuits. Simulations are compared with camera based measurements of individual pellet motion as well as bulk behavior of pellets on conveyors and in rotating balling drum. It is shown that the NDEM simulation model is applicable for the purpose of analysis, design and control of iron ore pelletizing systems. The sensitivity to model and simulation parameters is investigated. It is found that: the errors associated with large time-step integration do not cause statistically significant errors to the bulk behavior; rolling resistance is a necessary model component; and the outlet flow from the drum is sensitive to fine material adhering to the outlet creating a thick coating that narrows the outlet gaps. |
2014
|
 | Servin, Martin; Wang, Da; Lacoursière, Claude; Bodin, Kenneth: Examining the smooth and nonsmooth discrete element approaches to granular matter. In: International Journal for Numerical Methods in Engineering, vol. 97, no. 12, pp. 878–902, 2014. @article{servin2014examining,
title = {Examining the smooth and nonsmooth discrete element approaches to granular matter},
author = {Martin Servin and Da Wang and Claude Lacoursière and Kenneth Bodin},
url = {http://umit.cs.umu.se/granular/dem/
http://umit.cs.umu.se/modsimcomplmech/docs/papers/nonsmooth_DEM.pdf
https://vimeo.com/58530577},
doi = {10.1002/nme.4612},
year = {2014},
date = {2014-01-01},
journal = {International Journal for Numerical Methods in Engineering},
volume = {97},
number = {12},
pages = {878--902},
abstract = {The smooth and nonsmooth approaches to the discrete element method (DEM) are examined from a computational perspective. The main difference can be understood as using explicit versus implicit time integration. A formula is obtained for estimating the computational effort depending on error tolerance, system geometric shape and size, and on the dynamic state. For the nonsmooth DEM (NDEM), a regularized version mapping to the Hertz contact law is presented. This method has the conventional nonsmooth and smooth DEM as special cases depending on size of time step and value of regularization. The use of the projected Gauss-Seidel solver for NDEM simulation is studied on a range of test systems. The following characteristics are found. First, the smooth DEM is computationally more efficient for soft materials, wide and tall systems, and with increasing flow rate. Secondly, the NDEM is more beneficial for stiff materials, shallow systems, static or slow flow, and with increasing error tolerance. Furthermore, it is found that just as pressure saturates with depth in a granular column, due to force arching, also the required number of iterations saturates and become independent of system size. This effect make the projected Gauss-Seidel solver scale much better than previously thought.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
The smooth and nonsmooth approaches to the discrete element method (DEM) are examined from a computational perspective. The main difference can be understood as using explicit versus implicit time integration. A formula is obtained for estimating the computational effort depending on error tolerance, system geometric shape and size, and on the dynamic state. For the nonsmooth DEM (NDEM), a regularized version mapping to the Hertz contact law is presented. This method has the conventional nonsmooth and smooth DEM as special cases depending on size of time step and value of regularization. The use of the projected Gauss-Seidel solver for NDEM simulation is studied on a range of test systems. The following characteristics are found. First, the smooth DEM is computationally more efficient for soft materials, wide and tall systems, and with increasing flow rate. Secondly, the NDEM is more beneficial for stiff materials, shallow systems, static or slow flow, and with increasing error tolerance. Furthermore, it is found that just as pressure saturates with depth in a granular column, due to force arching, also the required number of iterations saturates and become independent of system size. This effect make the projected Gauss-Seidel solver scale much better than previously thought. |
 | Lindberg, Lars: Remote rendering of physics simulations and scalability aspects in web applications. Department of Computing Science, Umeå University, Sweden, 2014. @mastersthesis{Lindberg2014,
title = {Remote rendering of physics simulations and scalability aspects in web applications},
author = {Lars Lindberg},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-90042
https://umu.diva-portal.org/smash/get/diva2:725806/FULLTEXT01.pdf},
year = {2014},
date = {2014-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {This thesis, assigned by Algoryx Simulation AB, explores the concept of implementing a web application for managing Algoryx based physics simulations. The application enables users to get access to the Algoryx simulation software by providing a user interface for clients to submit scenes files to be simulated, and to view a 3D visualization of the finished simulations rendered directly in the web browser. This allows clients to do away with the work of performing the compute intensive physic simulations locally and instead hand over that responsibility to the web service, while the client only needs to handle the actual rendering. Applications made available through a web browser allows users to get easy access to applications that does not require any installation procedures. For that reason the clients do not need any simulation software or any plugin installed to access the service. This makes it easy to share results of simulations to customers by just giving out a link that can be accessed through a browser.
This paper also includes a theoretical study on scalability in web applications. The theory explains different ways of scaling, and common techniques and methods used to help achieving scalability that can be useful when designing and building scalable web system.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
This thesis, assigned by Algoryx Simulation AB, explores the concept of implementing a web application for managing Algoryx based physics simulations. The application enables users to get access to the Algoryx simulation software by providing a user interface for clients to submit scenes files to be simulated, and to view a 3D visualization of the finished simulations rendered directly in the web browser. This allows clients to do away with the work of performing the compute intensive physic simulations locally and instead hand over that responsibility to the web service, while the client only needs to handle the actual rendering. Applications made available through a web browser allows users to get easy access to applications that does not require any installation procedures. For that reason the clients do not need any simulation software or any plugin installed to access the service. This makes it easy to share results of simulations to customers by just giving out a link that can be accessed through a browser.
This paper also includes a theoretical study on scalability in web applications. The theory explains different ways of scaling, and common techniques and methods used to help achieving scalability that can be useful when designing and building scalable web system. |
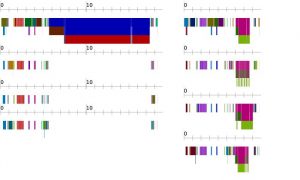 | Lacoursière, Claude; Nordfeldth, Fredrik; Linde, Mattias: A partitioning method for parallelization of large systems in realtime. In: Proceedings of the 3rd Joint International Conference on Multibody System Dynamics and the 7th Asian Conference on Multibody Dynamics, IMSD, 2014. @inproceedings{lacoursiere2014partitioning,
title = {A partitioning method for parallelization of large systems in realtime},
author = {Claude Lacoursière and Fredrik Nordfeldth and Mattias Linde},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/LacoursiereNordfeldthLinde_imsd-acmd2014.pdf},
year = {2014},
date = {2014-01-01},
booktitle = {Proceedings of the 3rd Joint International Conference on Multibody System Dynamics and the 7th Asian Conference on Multibody Dynamics, IMSD},
abstract = {We consider real-time simulation of multibody systems in the context of a virtual environment training simulator for sailors manipulating anchoring and tugging cables for stabilizing oil rigs. In such a scenario, there can be several ships mounted with cranes and winches, one oil rig, and several cables modeled with discrete elements [5]. Dry friction is also omnipresent is these systems. The scene used to produce the data in Fig. 1 2 contained a nearly one thousand rigid bodies and elements, as well as three thousand interactions which are either kinematic constraints or very stiff forces. Integrating the Differential Algebraic Equations (DAE)s of motions of such a system requires the solution of sparse linear systems of equations up to ten thousand equations in as many unknowns. In the real-time context of a 3D application running at the standard 60Hz rate, this means a computational budget of roughly 5ms, leaving time for other parts of the application. The only reasonable solution to this is parallelization. This is well understood and active field of research. However, the overhead of current techniques and libraries is such that they are advantageous only for very large systems, and certainly not in the real-time context. This goes both for graph analysis – METIS[2] can take more than 2ms on the problems we consider – and plain factorization [4]. In addition, good load balancing graph analysis with METIS for instance generally produces many fill-ins and offsets benefits of parallelism towards much larger problems. We discuss two aspect of the solution to this problem. The first is a much simplified graph analysis which takes some of the physics into account in the heuristics. The second is a matrix splitting which decouples two subsystems in such a way that strong interactions are taken into account in a stable way, but at the cost of accuracy.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
We consider real-time simulation of multibody systems in the context of a virtual environment training simulator for sailors manipulating anchoring and tugging cables for stabilizing oil rigs. In such a scenario, there can be several ships mounted with cranes and winches, one oil rig, and several cables modeled with discrete elements [5]. Dry friction is also omnipresent is these systems. The scene used to produce the data in Fig. 1 2 contained a nearly one thousand rigid bodies and elements, as well as three thousand interactions which are either kinematic constraints or very stiff forces. Integrating the Differential Algebraic Equations (DAE)s of motions of such a system requires the solution of sparse linear systems of equations up to ten thousand equations in as many unknowns. In the real-time context of a 3D application running at the standard 60Hz rate, this means a computational budget of roughly 5ms, leaving time for other parts of the application. The only reasonable solution to this is parallelization. This is well understood and active field of research. However, the overhead of current techniques and libraries is such that they are advantageous only for very large systems, and certainly not in the real-time context. This goes both for graph analysis – METIS[2] can take more than 2ms on the problems we consider – and plain factorization [4]. In addition, good load balancing graph analysis with METIS for instance generally produces many fill-ins and offsets benefits of parallelism towards much larger problems. We discuss two aspect of the solution to this problem. The first is a much simplified graph analysis which takes some of the physics into account in the heuristics. The second is a matrix splitting which decouples two subsystems in such a way that strong interactions are taken into account in a stable way, but at the cost of accuracy. |
 | Lu, Ying; Williams, Jedediyah; Trinkle, Jeff; Lacoursière, Claude: A framework for problem standardization and algorithm comparison in multibody system. In: International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. V006T10A016, American Society of Mechanical Engineers 2014. @inproceedings{lu2014framework,
title = {A framework for problem standardization and algorithm comparison in multibody system},
author = {Ying Lu and Jedediyah Williams and Jeff Trinkle and Claude Lacoursière },
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-129846},
doi = {10.1115/DETC2014-35041},
year = {2014},
date = {2014-01-01},
booktitle = {International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
volume = {46391},
pages = {V006T10A016},
organization = {American Society of Mechanical Engineers},
abstract = {The underlying dynamic model of multibody systems takes the form. of a differential Complementarity Problem (dCP), which is nonsmooth and thus challenging to integrate. The dCP is typically solved by discretizing it in time, thus converting the simulation problem into the problem of solving a sequence of complementarity problems (CPs). Because the CPs are difficult to solve, many modelling options that affect the dCPs and CPs have been tested, and some reformulation and relaxation options affecting the properties of the CPs and solvers have been studied in the hopes to find the "best" simulation method. One challenge within the existing literature is that there is no standard set of benchmark simulations. In this paper, we propose a framework of Benchmark Problems for Multibody Dynamics (BPMD) to support the fair testing of various simulation algorithms. We designed and constructed a BPMD database and collected an initial set of solution algorithms for testing. The data stored for each simulation problem is sufficient to construct the CPs corresponding to several different simulation design decisions. Once the CPs are constructed from the data, there are several solver options including the PATH solver, nonsmooth Newton methods, fixed-point iteration methods for nonlinear problems, and Lemke's algorithm for linear problems. Additionally, a user-friendly interface is provided to add customized models and solvers. As an example benchmark comparison, we use data from physical planar grasping experiments. Using the input from a physical experiment to drive the simulation, uncertain model parameters such as friction coefficients are determined. This is repeated for different simulation methods and the parameter estimation error serves as a measure of the suitability of each method to predict the observed physical behavior.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
The underlying dynamic model of multibody systems takes the form. of a differential Complementarity Problem (dCP), which is nonsmooth and thus challenging to integrate. The dCP is typically solved by discretizing it in time, thus converting the simulation problem into the problem of solving a sequence of complementarity problems (CPs). Because the CPs are difficult to solve, many modelling options that affect the dCPs and CPs have been tested, and some reformulation and relaxation options affecting the properties of the CPs and solvers have been studied in the hopes to find the "best" simulation method. One challenge within the existing literature is that there is no standard set of benchmark simulations. In this paper, we propose a framework of Benchmark Problems for Multibody Dynamics (BPMD) to support the fair testing of various simulation algorithms. We designed and constructed a BPMD database and collected an initial set of solution algorithms for testing. The data stored for each simulation problem is sufficient to construct the CPs corresponding to several different simulation design decisions. Once the CPs are constructed from the data, there are several solver options including the PATH solver, nonsmooth Newton methods, fixed-point iteration methods for nonlinear problems, and Lemke's algorithm for linear problems. Additionally, a user-friendly interface is provided to add customized models and solvers. As an example benchmark comparison, we use data from physical planar grasping experiments. Using the input from a physical experiment to drive the simulation, uncertain model parameters such as friction coefficients are determined. This is repeated for different simulation methods and the parameter estimation error serves as a measure of the suitability of each method to predict the observed physical behavior. |
