Simulation without compromise

Complexity
AGX Dynamics goes beyond rigid multibody dynamics. It can model real robots with motors, gearboxes, wires, dresspacks, grippers, suction cups, soft pads, compliant joints, flexible arms, tracks and wheels. Don’t worry about kinematic loops, contacts, gaps, or peg-in-hole scenario.
Fidelity
Develop test and optimize your robots and controllers in a rich virtual environment. With true to life complexity and high fidelity simulations, the time spent in the lab is dramatically reduced, there are fewer bad surprises, and you have more confidence.
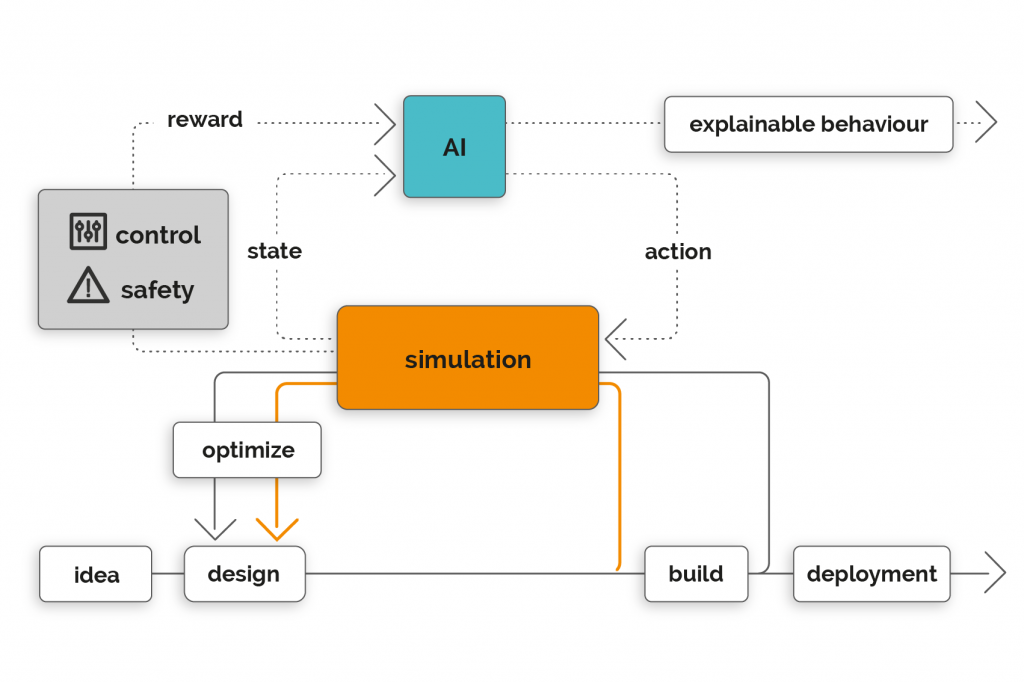
Fast learning
With fast simulations, large quantities of accurate synthetic data can be generated for machine learning and other AI algorithms. Interfaces to popular libraries make it easy develop autonomous systems quickly and reliably. This is the future!
Expressivity
Reliable contact simulation is paramount here and, as robots are made lighter and as cobots are introduced on a large scale, idealized models with perfect joints cannot work. Most commonly used multi-body dynamics simulation codes within the robotics community perform poorly on both counts. Realism does not go far enough. The imperfections of the real world are needed.
Speed and accuracy
AGX Dynamics delivers speed for real scenarios, not just for slippery contacts. It has been found to reach the same level of accuracy as the tolerances required for building the robots, and meets the requirements for optimizing task based controllers with Software-in-the-Loop (SIL) and then deploying on real hardware.
Evolution, integration
With several ongoing collaborative research projects with academic and industrial heavyweights, the functionality useful for robotics application is ever evolving. Both the Unreal Engine and Unity offer 3D authoring capabilities as well as integrated virtual sensor libraries and coupling with AI learning algorithms. Communication protocols such as ROS allow for extensive SIL testing in a realtime environment. Algoryx provides the tools to tie all this up together and help focusing on the real job: making good robots and autonomous systems. Whether you program in C++, C#, Matlab or python, chances are that we support your favorite communication.
Our OEM partners integrated AGX Dynamics into their own robotics, machine autonomy, virtual commissioning and process automation solutions. It is now available inside ABB RobotStudio and Chorenoid for instance, and there is more on the way. Perhaps your own solution?
- Speed, accuracy, stability
- Stable grasping
- Elastic parts and slack joints
- Extreme mass ratios
- Inverse dynamics
- Mobility computation
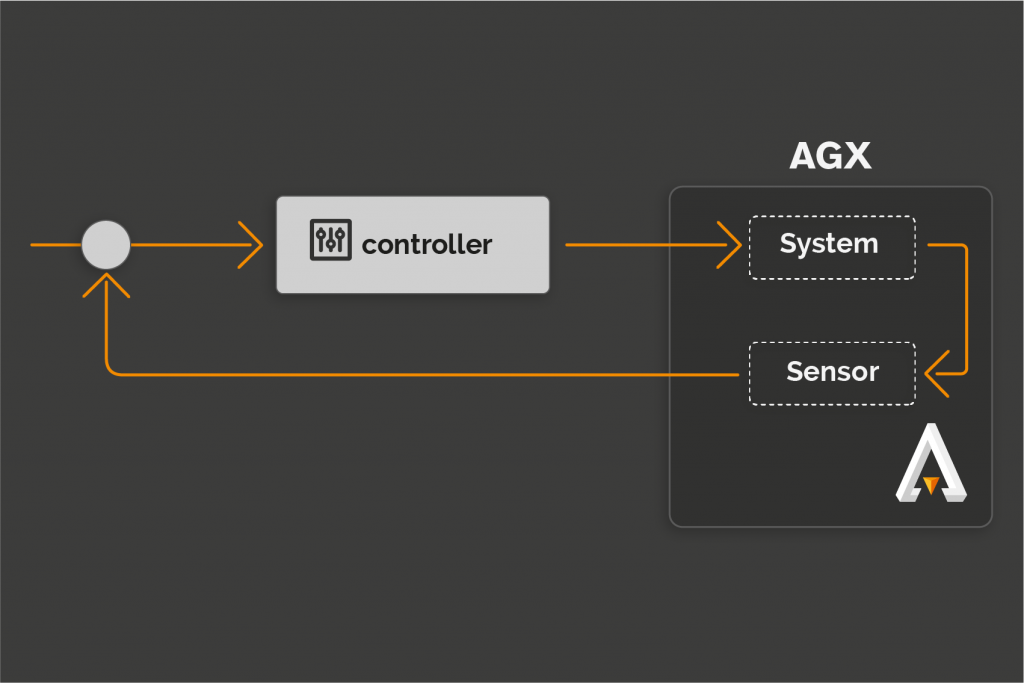
Control systems
A robot simulator gives unique possibilities to develop and test optimal and model predictive control systems. There are many ways to connect your controllers, e.g. over C/C++C#, Python, Simulink/Matlab, ROS or FMI. What suits you best?
Mechanical design
Iterate on different mechanical design solutions and test the performance using physics simulation. In this way you can avoid dire design mistakes and achieve a much higher innovation pace.
Trajectory planning
Use inverse dynamics to generate complex motion trajectories. This is generally more efficient than inverse kinematics since both inertia and dissipation can be taken into account.
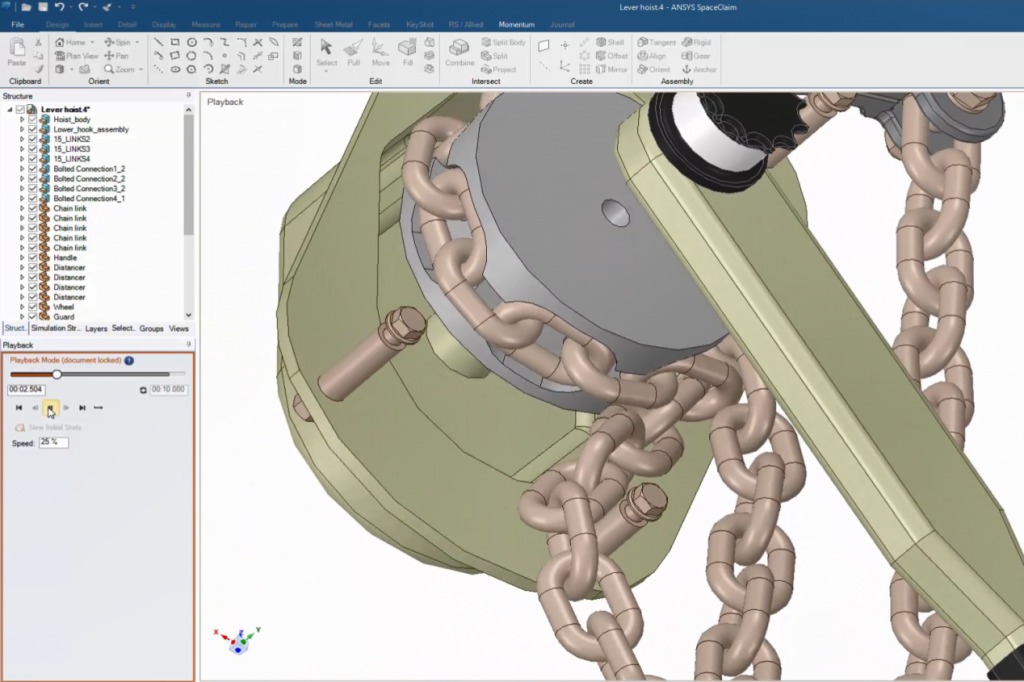
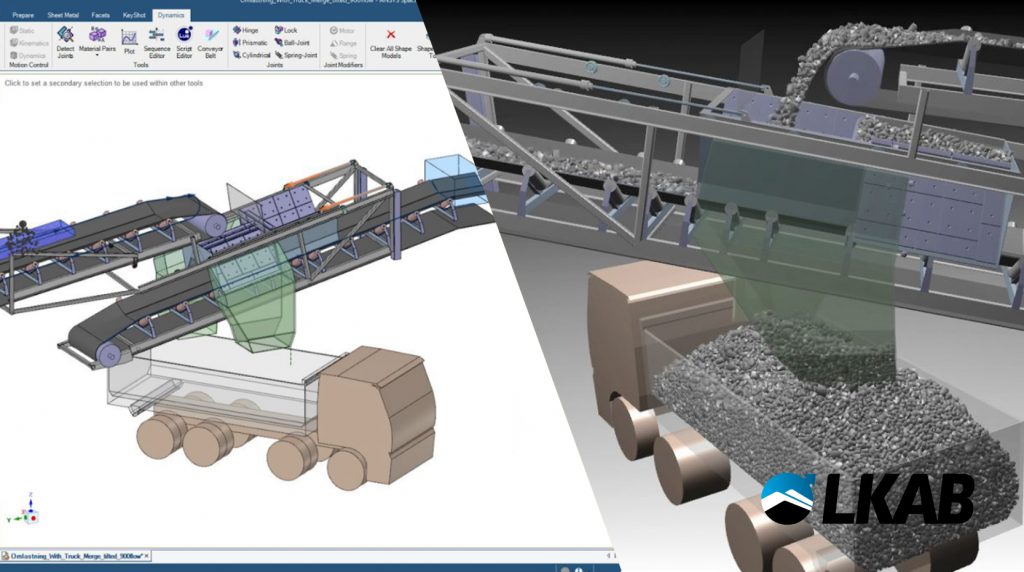
CAD modeling
Use Algoryx Momentum to import and modify any CAD model or efficiently build new geometry from scratch. Test your design directly inside Momentum or export the simulation to one of the many available run-time environments, including Unity and Unreal Engine where you can have a fully three dimensional immersive view of the motion.
Dress Packs and Cables
Dresspack are both necessary and troublesome as they wear and break. It is fundamental to simulate them simultaneously with the robots in order to analyze the inevitable damage endured during operation, and the impact of their dynamics on the control system. The unified models of AGX dynamics mean that no compromise is made, that damage estimates are as accurate as can be, and that controllers are subjected to the real loads during simulation.
Latest Robotics News

Algoryx is a new member of euRobotics

When Failure isn’t an Option: Advanced Simulations in Space Engineering