16. Material Pairs¶

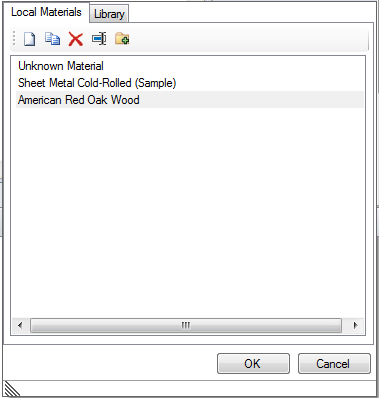
In the Material Pairs window the interaction between different material pairs can be specified. All SpaceClaim document materials currently available in the document’ local material library will be listed. Whenever a material is included into the document it will appear in the material pairs table. A solid associated to a material (through a material at the solid, or any parent component) will use the density property from the SpaceClaim material. Below is a list of materials currently used in a SpaceClaim document.
If a solid without a material is being simulated, the default density of 7800kg/m^3 will be used (steel). Changing the density for a material is done through the SpaceClaim material properties:
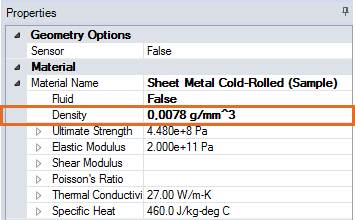
The density will be used to calculate the mass of an associated rigid body. The volume times density will result in a mass.
16.1. MaterialPairs¶
The MaterialPairs window lists all the material pairs in a table. For each material pair, the Interaction Properties can be specified. These properties are then used whenever geometries with these two materials collide during a simulation.
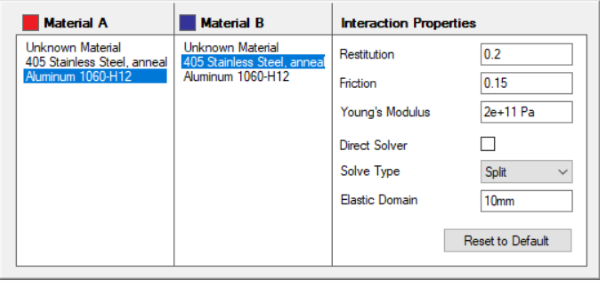
The physical attributes of two interacting materials are specified as:
Restitution: The coefficient of restitution, [0..1]. A fractional value representing the ratio of speeds before and after an impact. Default is 0.2.
See Granular Contact Model for how this affect Granular Contacts.
Friction: The friction coefficient [0..inf]. Specifies the friction applied when these two materials interact. Default is 0.15.
See Granular Contact Model for how this affect Granular Contacts.
Young’s modulus: This property dictates the stiffness of contact events and should be calculated according to the the following formula:
\(Y=Y_A * Y_B / (Y_A + Y_B)\)
Where: \(Y_A\) = Young’s Modulus (often referred to as the Modulus of Elasticity) of one of the materials in the material pair, and \(Y_B\) = Young’s Modulus of the other material in the pair. And it follows from this formula that if both bodies in a pair share the same Young’s Modulus, then
\(2Y = Y_A = Y_B\)
See Granular Contact Model for how this affect Granular Contacts.
Damping: Specifies the relaxation time for
See Granular Contact Model for more information.
Adhesion: Specifies the max adhesive force in an overlapping contact. When a contact has an overlap that is less than the Adhesive Overlap of the material, this scalar force will be active. This can be used to model adhesive materials.
Adhesion Overlap: Specifies the overlap in a contact where the adhesive force will be active. When the contact overlap exceeds this value, normal contact force calculation takes place. The reason for this value is the allow the contact to have some buffer distance where only the adhesion force is allowed operate.
See Granular Contact Model for more information.
Rolling Resistance: The rolling resistance coefficient [0..inf]. The rolling resistance force is applied on rotational movements around the directions in the friction plane. Default is 0.2. Only used in contacts with Granular bodies.
Twisting Resistance: The twisting resistance coefficient [0..inf]. The twisting resistance force is applied on rotational movements around the contact normal. Default is 0.001. Only used in contacts with Granular bodies.
See Granular Contact Model for how this affect Granular Contacts.
Direct Solver: Solving friction in the direct solver (see Direct Solver) which results in more accurate and stable simulations. It can have a major negative affect on the performance for systems with many contacts.
Solve type: Specifies the type of solver to be used when these material pair overlaps.
Split - (Default): Direct solver for normal forces and iterative for frictional forces.
Iterative - Fast iterative solver for both normal and frictional forces. May introduce various artifacts such as large overlaps. Might be useful when you want to simulate a larger number of objects interacting with each other: a brick wall, bottles on a conveyor belt etc.
Attention
Contact that involve Granular bodies will always be solved using the iterative solver, regardless of solver settings in the material pair! See Granular Contact Model.
Elastic Domain: Determines the span which the material is elastic in. Momentum calculates how long this distance is, but the material settings will put a limit on this value - it can not be more than the value given by elastic domain. For further information, see Contact Mechanics. The default value for elastic domain is 10mm, the minimum value is 0.1mm.
Reset to default: Will reset the material pair to their default values.
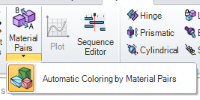
16.2. Color by Material¶
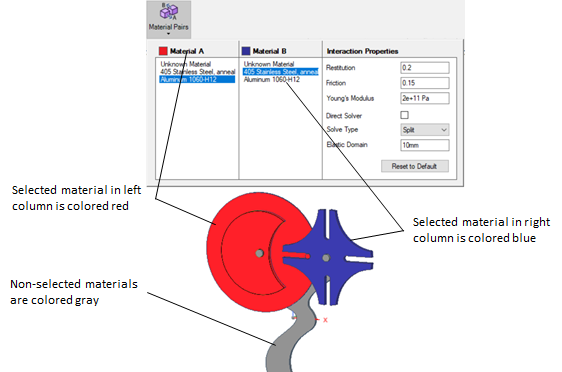
By default, when the MaterialPairs window is opened and you have more than one material in the system, the solids with corresponding selected materials will be colored. This aids in understanding the structure of the simulation, highlighting which solids have certain simulation materials. You can toggle the automatic coloring with the pull down menu for the MaterialPairs button:
Below is an image illustrating the selection of two materials:
Attention
If Passive Mode is activated the coloring of components is disabled regardless of whether the coloring is enabled or not.
16.3. Export Material¶
Exports the current document’s SpaceClaim Materials and Material Pairs interaction properties to an .xml file.
16.4. Load Material¶
Loads a material configuration .xml file that has been created with the Export Material button. This will create SpaceClaim Materials and their corresponding Material Pairs properties in the current documemt.