22. Conveyor Belt
The  Conveyor Belt-tool can be used in order to simulate a basic conveyor belt. No internal mechanics in the conveyor belt are simulated, but only velocity changes in contacts between conveyor belt and transported goods.
The conveyor belt uses the surface velocity property inherent in contact points, similar to the Surface Velocity property of a geometry.
Conveyor Belt-tool can be used in order to simulate a basic conveyor belt. No internal mechanics in the conveyor belt are simulated, but only velocity changes in contacts between conveyor belt and transported goods.
The conveyor belt uses the surface velocity property inherent in contact points, similar to the Surface Velocity property of a geometry.
22.1. Usage
A conveyor belt lives on a connected chain or loop of edges.
Note that there can be only one conveyor belt per solid.
22.1.1. Create on face
It can be created either by clicking on a face - then it will be created on all edges around the face.
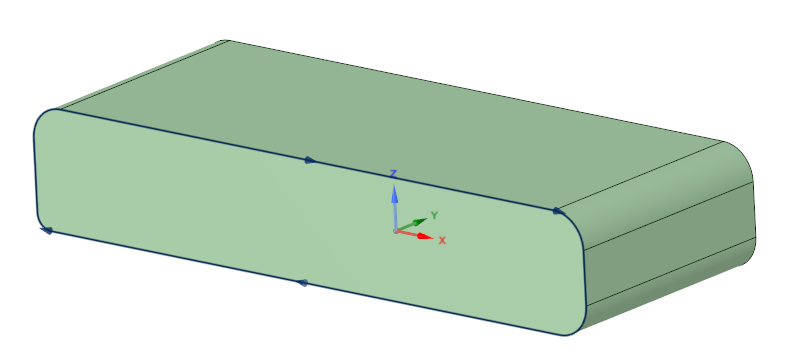
The blue arrows indicate the direction.
22.1.2. Create on edges
Alternatively, it can be created by clicking on an edge, and Ctrl-clicking neighbouring edges. Press the  OK-Button to finalize the edge-selection and create the conveyor belt.
OK-Button to finalize the edge-selection and create the conveyor belt.
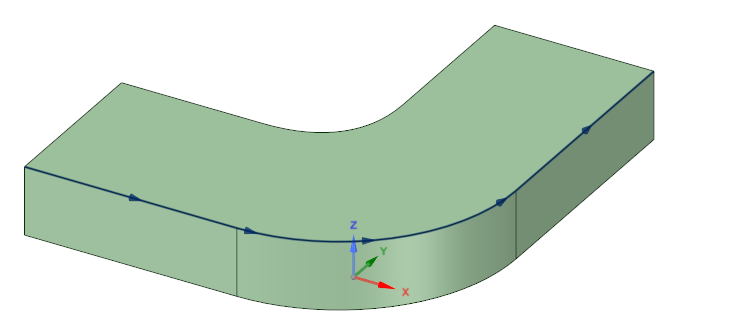
The blue arrows indicate the direction.
22.2. Properties
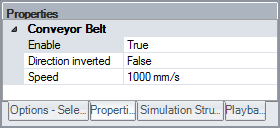
When one or multiple conveyor belts are selected the properties of the conveyor belt can be changed from the properties tab.
Enable: Specifies whether the joint is enabled or not.
Direction inverted: Should the direction of the conveyor belt be inverted? The direction of the arrows in the design window will flip.
Speed: The speed of the conveyor belt, in units of linear velocity (e.g. m/s).
22.3. Technical background
When aiming at simulating conveyor belt-like behavior, for simple cases it might suffice to use a Geometry’s Surface Velocity. However, this velocity field is constant over the whole surface of the Geometry. For cases like in a conveyor belt bending upwards and downwards, one wants the velocity to follow around the surface of the geometry which might be more complex.
A conveyor belt has different surface velocity directions for different parts of the belt, but the length - or rather “speed” - remains the same. The different directions are computed from a list of points along the surface of the belt in direction of its movement - the single directions are computed from one point to the next.
For a given contact point, the closest line segment from one conveyor belt point to the next is chosen for the surface velocity. This might give wrong behavior in more advanced concave cases, which is a limitation of the model. For “typical” conveyor belt cases however, it should work fine.