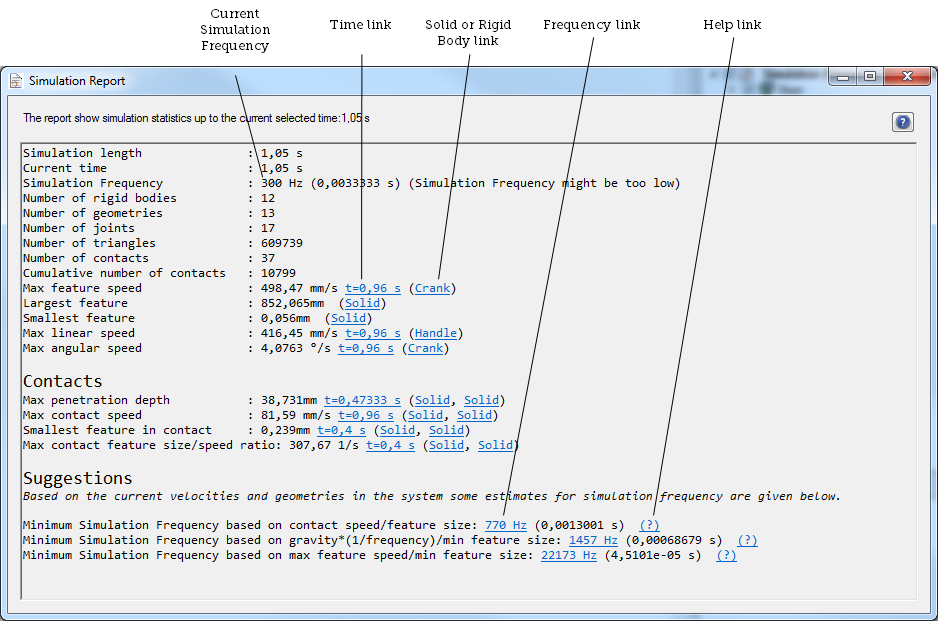
40. Simulation Report

The Simulation Report is a window displaying information obtained from the current simulation recording. This is also a useful tool for locating which objects (solids and/or rigid bodies) have the largest speeds, where the deepest contact penetration occurs and also when in time these events occur.
By clicking the links in the report, you can answer a number of questions:
What rigid body has the largest linear speed?: Click on the link to the Rigid Body link next to the value Max linear speed.
When in time did we have the deepest contact penetration?: Click on the Time Link next to the value Max penetration depth.
What might be a suitable simulation frequency based on the velocities and contacts in my simulation?: Click on a Set Frequency link
Which solid contains the smallest feature in my model?: Click on the Solid link next to the value Smallest feature.
40.1. Available data
Simulation length - The total length of the recorded simulation.
Current time - The current time of the recorded simulation, can be changed using the Playback Tab.
Simulation Frequency - The current simulation frequency. If printed in red, this might indicate that the current Simulation Frequency is too low.
Number of rigid bodies - The total number of enabled rigid bodies in the simulation.
Number of geometries - The total number of enabled geometries/solids in the simulation.
Number of joints - The total number of enabled joints in the simulation.
Number of triangles - The total number of triangles (in triangle meshes) in enabled solids in the simulation. These triangles comes from the tesselation of non-primitives (B-Reps etc.).
Number of contacts - The number of contacts at the current simulation step.
Cumulative number of contacts - The accumulated number of contacts up until the current time in the simulation recording.
Max feature speed - The largest measured speed on all geometries bounding volumes up until the current time in the simulation, the time where it occurred and a link to the rigid body.
Largest feature - The largest feature of all geometries in the simulation and a link to the solid.
Smallest feature - The smallest feature of all geometries in the simulation and a link to the solid.
Max linear speed - The largest measured linear speed of all rigid bodies up until the current time in the simulation, the time it occurred and a link to the rigid body.
Max angular speed - The largest measured angular speed of all rigid bodies up until the current time in the simulation, the time it occurred and a link to the rigid body.
If there are contacts in the system, the following data is also available:
Max penetration depth - The depth of the deepest contact in the simulation, the time it occurred and links to the two solids involved in the contact.
Max contact speed - The largest relative speed between two colliding objects, the time it occurred and links to the two solids involved in the contact.
Smallest feature in contact - The smallest feature involved in a contact, the time it occurred and links to the two solids involved in the contact.
Max contact feature/speed ratio - This is the largest ratio for feature size divided with relative contact speed, the time it occurred and links to the two solids involved in the contact.
40.2. Max feature speed
This is measured by measuring the total linear velocity (including angular velocity) for each of the corners of the bounding volume of the geometry. This will give you an estimate of the largest speed in the simulation.
The figure above illustrates the maximum feature speed, incorporating the linear and angular velocity of the center of mass.
40.3. Largest feature
Depending on the type of the shape, the largest feature is calculated as:
Sphere - the diameter
Box - The largest edge of the box
Cylinder - maximum of the diameter and the length of the cylinder.
Triangle mesh - diagonal of the local bounding box.
40.4. Smallest feature
Depending on the type of the shape, the smallest feature is calculated as:
Sphere - the diameter
Box - The shortest edge of the box
Cylinder - minimum of the diameter and the length of the cylinder.
Triangle mesh - Minimum of the average of a triangle’s 3 edges for all triangles.
The smallest feature might be a very important value when it comes to determine a suitable time step. If the smallest feature is involved in a contact, you might get bad penetration or even tunneling effects if the simulation frequency is not large enough to resolve these contacts. However, in many cases, it is only relevant to look at actual intersecting features.
40.5. Suggestions for Simulation Frequency
Based on various properties of a recorded simulation, the add-in can suggest a suitable Simulation Frequency. It is important to understand that it is a suggestion. In some cases the suggestions for frequency can be very high due to for example small details/features in the system.
The suggestions for Simulation Frequency are based on various properties of the simulation such as:
Current simulation Frequency
Gravity
Contacts during simulation recording.
Feature sizes in the geometries part of the simulation.
By clicking a suggested simulation frequency, you can choose to reset the simulation and use the suggested frequency.
The question mark (?) will take you to one of the help topics below.
40.5.1. Suggestion based on Contact Speed and Feature Size
This suggestion is based on actual contact data hence it is only available when there are contacts in the recorded simulation. By measuring the ratio of contact speed divided with feature size, the largest value is tracked and reported. It will suggest a frequency large enough to resolve the contact speed, such that the feature is not moving more than half its length during one time step.
Below is the formula for calculating the suggested simulation frequency:
contact_speed - The relative speed at the contact between the two interacting geometries
feature_size - The smallest feature involved in the contact
\(f_{min}=maximum\_for\_all\_contacts(\dfrac{contact\_speed}{feature\_size})\)
40.5.2. Suggestion based on Max Feature Speed and Min Feature Size
This suggestion is based on the largest measured speed on any feature/part of the simulation vs the smallest feature located in the simulation. Hence, this will always be an over estimated suggestion for the smallest simulation frequency. It is very improbable that this smallest feature will be the part that moves with the highest speed. But it can happen.
Below is the formula for calculating the suggested simulation frequency:
smallest_feature - The smallest feature found in the whole model.
largest_feature_speed - The largest measured speed of any part of the model.
\(f_{min}=\dfrac{largest\_feature\_speed}{smallest\_feature}\)
40.5.3. Suggestion based on gravity and Min Feature Size
This suggestion is based on the current simulation frequency, the gravity and the smallest feature in the simulation:
smallest_feature - The smallest feature found in the whole model.
current_simulation_frequency - The simulation frequency used in the simulation recording.
gravity - The magnitude of the gravity used in the simulation recording.
\(f_{min}=gravity*\dfrac{(\dfrac{1}{current\_simulation\_frequency})}{smallest\_feature}\)
40.5.4. Lowest recommended Simulation Frequency
If the velocities in the system are very low and there are only relatively large features in the system, the suggested frequency steps might become too low. Therefore there is a limit of 100Hz for suggested simulation Frequency.